аварийное торможение — это… Что такое аварийное торможение?
- аварийное торможение
-
– осуществляется при выходе из строя рабочей тормозной системы – при этом используется стояночный тормоз или скольжение колеса или кузова по препятствию сбоку (поребрик, стена, забор и т.д.).
EdwART. Словарь автомобильного жаргона, 2009
- аварийное выключение режима охраны
- аварийный автомобиль
Смотреть что такое «аварийное торможение» в других словарях:
аварийное торможение — авто осуществляется при выходе из строя рабочей тормозной системы, при этом используется стояночный тормоз или скольжение колеса или кузова по препятствию сбоку (поребрик, стена, забор и т.

Автоматическое (аварийное) торможение прицепа (полуприцепа) автомобиля — автоматическое (аварийное) торможение торможение прицепа, выполняемое тормозной системой без управляющего воздействия водителя при разрыве тормозных магистралей тормозного привода;… Источник: Постановление Правительства РФ от 10.09.2009 N 720… … Официальная терминология
автоматическое торможение — Торможение прицепа или прицепов, осуществляемое автоматически в случае разъединения транспортных средств, образующих комбинацию, включая разрыв сцепного устройства, при этом эффективность торможения остальных транспортных средств, входивших в… … Справочник технического переводчика
Реверсивное торможение — Реверсивное торможение вид торможения, при котором тормозной момент создаётся за счёт изменения направления тяги двигателя на противоположный движению.
По сравнению с другими видами торможения, реверсивное позволяет сохранить высокую… … ВикипедияХарактеристики — К.4. Характеристики Применяют следующие дополнительные характеристики: К.4.3.1.2. Номинальное напряжение изоляции Минимальное значение номинального напряжения изоляции должно быть 250 В. К.4.3.2.1. Условный тепловой ток на открытом воздухе… … Словарь-справочник терминов нормативно-технической документации
Характеристики тормозных устройств — 5.2. Характеристики тормозных устройств 5.2.1. Все тормозные системы, которыми оборудовано транспортное средство, должны отвечать требованиям, предъявляемым к системам рабочего, аварийного и стояночного торможения. 5.2.2. Системы, обеспечивающие… … Словарь-справочник терминов нормативно-технической документации
ГОСТ Р 41.13-H-99: Единообразные предписания, касающиеся официального утверждения легковых автомобилей в отношении торможения
ГОСТ Р 41.13-Н-99: Единообразные предписания, касающиеся официального утверждения легковых автомобилей в отношении торможения — Терминология ГОСТ Р 41.13 Н 99: Единообразные предписания, касающиеся официального утверждения легковых автомобилей в отношении торможения: 2.1. антиблокировочная система: Элемент системы рабочего тормоза, который во время торможения… … Словарь-справочник терминов нормативно-технической документации
Ускорение — У этого термина существуют и другие значения, см. Ускорение (значения). Ускорение Размерность LT−2 Единицы измерения СИ … Википедия
МиГ-27 — ВВС Индии, 2011 год. Тип ис … Википедия


 13 H 99: Единообразные предписания, касающиеся официального утверждения легковых автомобилей в отношении торможения: 2.1 антиблокировочная система: Элемент системы рабочего тормоза, который во время торможения автоматически … Словарь-справочник терминов нормативно-технической документации
13 H 99: Единообразные предписания, касающиеся официального утверждения легковых автомобилей в отношении торможения: 2.1 антиблокировочная система: Элемент системы рабочего тормоза, который во время торможения автоматически … Словарь-справочник терминов нормативно-технической документацииКак работает экстренное торможение | Volvo Trucks Magazine
Аварии, при которых один автомобиль врезается в заднюю часть другого, встречаются очень часто. Такие происшествия обычно случаются, когда водитель заднего автомобиля отвлекается от дороги. Очевидно, что при участии в аварии грузовых автомобилей ее последствия будут еще более опасными из-за их большого размера и веса.
Такие происшествия обычно случаются, когда водитель заднего автомобиля отвлекается от дороги. Очевидно, что при участии в аварии грузовых автомобилей ее последствия будут еще более опасными из-за их большого размера и веса.
Непрерывное тестирование системы экстренного торможения гарантирует, что грузовой автомобиль сможет остановиться вовремя, а если это не удастся, то последствия возможного столкновения и полученные травмы будут сведены к минимуму. Для обеспечения соответствия нормативным требованиям система постоянно модифицируется. Самое важное для нас в этом процессе — это стремление к тому, чтобы сделать дорожное движение с участием грузовых автомобилей Volvo как можно более безопасным. Мы гордимся своей работой в этом направлении.
1. Камера и радар
Камера определяет дистанцию и тип находящегося перед грузовиком объекта. Радар измеряет скорость движения объекта и расстояние до него. Важным фактором является то, что водители могут положиться на систему, так как она не генерирует большого количества ложных предупреждающих сообщений. Видеокамера и радар работают совместно и выдают предупреждения только в случае необходимости.
Видеокамера и радар работают совместно и выдают предупреждения только в случае необходимости.
2. Объединение датчиков
Когда камера и радар передают данные процессору, происходит объединение данных с этих двух датчиков, что позволяет лучше обработать ситуацию. Совместная работа датчиков крайне важна, поскольку она позволяет отличить настоящие автомобили от объектов, которые не представляют реальной угрозы, например, пустой жестяной банки. Ведь двумя глазами вы воспринимаете больше информации, чем одним.
3. Блок управления
Все данные, получаемые от камеры, радара и грузовика, а также информация о действиях водителя поступают в блок управления. Программа анализирует данную информацию и в случае угрозы возникновения аварии задействует систему предупреждения и торможения грузового автомобиля.
4. Система торможения
Система торможения активируется в том случае, если водитель не отреагировал на предупреждения о столкновении. Сначала автомобиль плавно притормаживает, коробка передач отсоединяется от двигателя, и грузовик замедляет свое движение. Тормозная система грузового автомобиля теперь включена, и в случае возникновения критической опасности происходит полное торможение, при этом загораются стоп-сигналы. В случае отсутствия реакции со стороны водителя активируется стояночный тормоз.
Тормозная система грузового автомобиля теперь включена, и в случае возникновения критической опасности происходит полное торможение, при этом загораются стоп-сигналы. В случае отсутствия реакции со стороны водителя активируется стояночный тормоз.
Cистема экстренного и автоматического торможения автомобилей INFINITI
Бренд INFINITI создал множество передовых технологий, которые делают вождение максимально автономным и безопасным. Особое внимание разработчики уделили вопросам предотвращения столкновений и минимизации их последствий. Применяемая на автомобилях нового поколения автоматическая система экстренного торможения – это комбинация интеллектуальных ассистентов, которые оказывают эффективную помощь в контроле над окружающим потоком машин, своевременном обнаружении рисков и правильном реагировании на аварийную ситуацию.
Контроль дистанции и дорожной ситуации
Ключевым элементом системы автоматического торможения автомобилей INFINITI является технология предотвращения фронтального столкновения – Forward Emergency Braking.
- Предупреждает водителя об опасности звуковыми и световыми сигналами, параллельно поднимая педаль акселератора и увеличивая натяжение ремней безопасности.
- В случае отсутствия реакции на оповещение и дальнейшее сокращение расстояния между машинами, автоматически задействует штатный тормоз для частичного замедления.
- Если дистанция продолжает уменьшаться, FEB активирует систему экстренного торможения для полной остановки авто, что помогает избежать аварии или смягчить ее последствия.
Надёжная система предупреждения столкновений
Превентивная защита обеспечивается функцией Predictive Forward Collision Warning.
Главная особенность технологии – она сканирует дорожную обстановку на расстояние двух идущих впереди автомобилей. Ассистенты FCW/ PFCW рассчитывают параметры движения (дистанция, скорость) обоих транспортных средств. При резком замедлении первого автомобиля водитель INFINITI мгновенно получает предупреждение о риске столкновения, не дожидаясь торможения находящейся прямо перед ним машины.
Благодаря тому, что система предупреждения об экстренном торможении заблаговременно оповестила о потенциальной опасности, вы получаете больше времени, чтобы правильно отреагировать и избежать столкновения.
Что делать, если отказали тормоза автомобиля. Аварийное торможение
К счастью, как для владельцев авто, так и для пешеходов, ситуации, когда у машины на скорости отказывают тормоза, происходят нечасто.
Для записи, уточнения стоимости, консультаций
+7 (812) 245-90-44
Нужны запчасти — звоните:
+7 (812) 245-90-44
Адрес сервиса:
Мебельный проезд, 2Д
Причины отказа тормозов
Прежде, чем перейти к практическим советам, нужно рассмотреть основные причины, по которым машина может потерять тормоза:
- машина эксплуатировалась с нарушением правил;
- тормозная система была укомплектована низкокачественными деталями, которые очень быстро вышли из строя;
- детали просто выработали свой эксплуатационный срок.

«Тревожные звоночки»: как машина сигнализирует о возможной опасности
Есть целый ряд признаков, по которым можно определить начинающиеся проблемы в тормозном узле автомобиля:
- В момент торможения машина уходит вбок. Здесь есть риск, что если возникнет необходимость в применении режима экстренного торможения, водитель попросту может не выдержать необходимую траекторию движения.
- Возникли изменения в ходе педали тормоза: она или слишком легко уходит в пол, либо для того, чтобы затормозить, приходится прилагать усилия. В последнем случае водитель в случае необходимости резко затормозить попросту может не рассчитать силу нажатия и упустит драгоценные доли секунды, в результате возрастет длина тормозного пути.
- Явными признаками того, что справиться с машиной в нештатной ситуации будет невозможно, является вибрация педали тормоза или руля при торможении.
- Чрезмерное разогревание колесных дисков и тормозных барабанов при езде может заклинить тормозной механизм.

Если хоть какой-то из перечисленных примеров актуален в вашем случае – это причина срочно посетить автосервис и пройти диагностику тормозной системы.
Отказали тормоза: алгоритм действий
Если с вами все же приключилось это несчастье во время движения, не паникуйте – выход есть даже из такого положения:
- постарайтесь снизить скорость путем нисходящего переведения ручки скоростей в нижнее положение, а затем воспользуйтесь ручным тормозом. Если у вас коробка-автомат, данный способ тоже можно использовать. Для этого переведите селектор из режима D по такой схеме – 3 – 2 – 1. В крайнем случае, если ничего не помогает, и скорость не снижается, воспользуйтесь режимом P. При этом трансмиссия будет заблокирована. Это далеко не самый лучший вариант для коробки передач, поскольку высока вероятность выхода ее из строя. Однако даже такая поломка – ничто по сравнению со своей или чужой жизнью.
- попробуйте использовать ручной тормоз. Однако тормозить при помощи «ручника» нужно правильно. Если вы решили, что другого выхода остановить машину нет, старайтесь удерживать руль одной рукой, второй же в это время притормаживайте ручным тормозом. При этом помните: ни в коем случае нельзя резко и полностью блокировать ось, действуйте плавно, чтобы автомобиль сбрасывал скорость постепенно.
- в крайнем случае, когда все варианты не работают, нужно прибегать к самому опасному способу – сбрасывать скорость за счет трения об объекты, находящиеся на обочине проезжей части – машины, строения, бордюры, заборы. Это, безусловно, далеко не лучшее средство, сопряженное с разрушением и порчей свеого и чужого имущества, но это необходимо, когда речь идет о сохранении жизней – своей и своих пассажиров.
 Если вы решили, что другого выхода остановить машину нет, старайтесь удерживать руль одной рукой, второй же в это время притормаживайте ручным тормозом. При этом помните: ни в коем случае нельзя резко и полностью блокировать ось, действуйте плавно, чтобы автомобиль сбрасывал скорость постепенно.
Если вы решили, что другого выхода остановить машину нет, старайтесь удерживать руль одной рукой, второй же в это время притормаживайте ручным тормозом. При этом помните: ни в коем случае нельзя резко и полностью блокировать ось, действуйте плавно, чтобы автомобиль сбрасывал скорость постепенно.Для того чтобы избежать нежелательных и крайне опасных последствий на дороге, каждый автовладелец должен помнить о необходимости регулярного прохождения техосмотра. На СТО при необходимости смогут произвести и диагностику тормозной системы, и выполнить ремонт двигателя, и качественно заменить масло в коробке передач. Общая исправность всех узлов и агрегатов автомобиля поможет не только сохранить свое и чужое имущество, но и самое дорогое – человеческие жизни.
Общая исправность всех узлов и агрегатов автомобиля поможет не только сохранить свое и чужое имущество, но и самое дорогое – человеческие жизни.
замена тормозных колодок Ford в СПб
установка парктроника в Петербурге
автоэлектрик в СПб
развал схождение цена в Петербурге
Аварийное контактное торможение
Аварийное контактное торможение
Когда исчерпаны все возможности и остановить автомобиль нельзя из-за отказа тормозной системы или недостаточной дистанции, то почти всегда имеется способ избежать тяжких последствий ДТП управляемым ударом о препятствие. Этот способ торможения применяется в тех случаях, когда нет альтернативы и опасности подвергается жизнь человека.
Конструкция автомобиля предусматривает его пассивную безопасность при столкновении с препятствием. Наибольшими буферными возможностями обладают крылья и багажник. Глубокие пазухи и сминаемые элементы кузова позволяют поглотить энергию даже сильных ударов, деформируясь при контакте с препятствием. Наибольшую жесткость имеют продольные лонжероны, поэтому лобовой удар является самым травмоопасным.
Наибольшую жесткость имеют продольные лонжероны, поэтому лобовой удар является самым травмоопасным.
Для того чтобы сделать аварийную ситуацию управляемой, нужно прекратить торможение, уйти от’ лобового столкновения дозированным рулением и попытаться погасить скорость скользящим ударом о препятствие, учитывая возможность отскока и соответствующее изменение траектории.
Водитель, обладающий высокой квалификацией, может выполнить контактное торможение из произвольного вращения (см. прием 48), так как боковое скольжение или вращение позволит уменьшить силу удара и частично погасить скорость до удара с препятствием.
Перед моментом удара водитель должен принять меры самостраховки (упереться левой ногой в пол, обеспечить максимальный контакт с сиденьем и стопорящий захват рулевого колеса и др.).
Выводя автомобиль на касательный удар о препятствие, водитель может предусмотреть направление отскока и продолжить стабилизацию приемами руления (см. приемы 35 — 42) до полной остановки автомобиля, а затем принять необходимые меры для уменьшения тяжести последствий столкновения.
Если авария неизбежна, постарайтесь сделать ситуацию управляемой. Не тормозите и уходите от лобового столкновения дозированным силовым рулением. Скользящий удар о препятствие поможет погасить скорость.
Система автоматического торможения (EBA) | NEOPLAN
Система автоматического торможения (EBA) | NEOPLAN {{link-list}}Система автоматического торможения EBA (Emergency Brake Assist) нового поколения дополнительно повышает безопасность автомобилей NEOLPLAN и значительно снижает риск ДТП. Система новой разработки использует информацию радарного датчика, установленного в передней части автомобиля, в сочетании с данными камеры в ветровом стекле. Благодаря этой комбинации датчиков система еще быстрее и с большей надежностью распознает опасные ситуации, а в критическом случае раньше инициирует аварийное торможение.
При экстренном торможении дополнительно к фонарям сигнала торможения активируется сигнал аварийного торможения ESS (Emergency Stopping Signal) — система аварийной световой сигнализации мигает с повышенной частотой, сообщая участникам движения об экстренной ситуации, и тем самым снижает опасность наезда.
Система автоматического торможения с комбинацией датчиков входит в серийное оснащение всех автомобилей NEOPLAN, для которых с ноября 2015 г. действует соответствующее требование для первой регистрации ТС. Используемая технология уже сегодня значительно превосходит вступающие в силу с ноября 2018 г. ужесточенные требования ЕС. Таким образом, клиенты NEOPLAN могут воспользоваться преимуществами передовой и перспективной системы.
Доступно для следующих моделей.
Системы безопасности и помощи водителю
Система поддержания скорости по расстоянию до автомобиля впереди: система поддержания скорости по расстоянию до автомобиля впереди (ACC)Система помощи при поворотах, выдающая активное предупреждение, с функцией распознавания пешеходовСистема слежения за дорожной разметкой: система Lane Guard (LGS)Система контроля за вниманием водителя: AttentionGuardСистема контроля давления в шинах : Tyre Pressure Monitoring (TPM)Электронная система курсовой устойчивости (ESP)Электронная тормозная система (EBS)Управление вспомогательными тормозными системами с бремзоматом: MAN BrakeMaticМногофункциональное рулевое колесоЦифровая система обзора заднего вида MAN OptiView
Рекомендовать страницу
Поделиться на Facebook Поделиться в Twitter Поделиться в LinkedInАвтономные системы экстренного торможения, адаптированные к заснеженным дорожным условиям
Во всем мире до 50 миллионов человек получают травмы и более 1,2 миллиона человек ежегодно умирают от дорожно-транспортных происшествий (Всемирная организация здравоохранения, 2015 г. ). В Соединенных Штатах неблагоприятная погода ежегодно ассоциировалась с более чем 1,5 миллионами ДТП, в результате которых около 800 000 человек получили травмы и 7 000 человек погибли (National Research Council 2004). Статистический анализ данных о реальных авариях показывает, что снегопад способствует повышению частоты несчастных случаев (Andrey et al. 2003; Eisenberg and Warner 2005; Khattak and Knapp 2001; Shankar et al. 1995). Зимние осадки независимо от их типа (например, снег, ледяной дождь, ледяные шарики или мокрый снег) были связаны с увеличением дорожно-транспортных происшествий на 19% и увеличением травматизма на 13% по сравнению с засушливыми условиями (Black and Mote 2015).
). В Соединенных Штатах неблагоприятная погода ежегодно ассоциировалась с более чем 1,5 миллионами ДТП, в результате которых около 800 000 человек получили травмы и 7 000 человек погибли (National Research Council 2004). Статистический анализ данных о реальных авариях показывает, что снегопад способствует повышению частоты несчастных случаев (Andrey et al. 2003; Eisenberg and Warner 2005; Khattak and Knapp 2001; Shankar et al. 1995). Зимние осадки независимо от их типа (например, снег, ледяной дождь, ледяные шарики или мокрый снег) были связаны с увеличением дорожно-транспортных происшествий на 19% и увеличением травматизма на 13% по сравнению с засушливыми условиями (Black and Mote 2015).
Дорожные условия с уменьшенным трением (например, мокрые, снежные, обледенелые поверхности) способствуют более высокому уровню аварийности, хотя серьезность этих аварий варьируется в зависимости от пола и возрастных групп (Black and Mote 2015; Morgan and Mannering 2011; Myers et al. 2011 Ulfarsson and Mannering 2004). В неблагоприятную погоду пожилые водители демонстрировали повышенную вероятность причастности только к несчастным случаям, связанным с повреждением имущества, но не к тем, кто получил травмы. Причиной этого может быть их большой опыт работы в качестве водителей (Black and Mote 2015). Статистические данные показывают, что женщины реже участвуют в дорожно-транспортных происшествиях, чем мужчины (Statistisches Bundesamt (Федеральное статистическое управление Германии), 2016 год; Oltedal и Rundmo, 2006 год; Pulido и др., 2016 год; Родос и Пивик, 2011 год; Скотт-Паркер и Овьедо-Треспаласиос, 2017 год). ; Tavris et al. 2001). Исследования также показывают возрастные и гендерные различия в поведении при торможении, которые могут объяснить различия в показателях несчастных случаев (Kusano et al. 2015; Li et al. 2016; Montgomery et al. 2014). В эксперименте по натуралистическому вождению Montgomery et al. (2014) обнаружили, что женщины применяют тормоза в среднем на 1,3 с раньше, чем мужчины, а водители младше 30 лет — на 1,7 с позже, чем водители старше 30 лет. Тем не менее, есть также исследования тормозного поведения, которые не показывают половых различий (Hancock et al. 2002). Исследования показывают, что водители могут приспосабливаться к снегу, снижая скорость и поддерживая более продолжительный ход на заснеженных дорогах по сравнению с сухими дорогами (Kilpeläinen and Summala 2007). Водители могут использовать визуальные сигналы, чтобы предвидеть снижение уровня трения и адаптировать стиль вождения, прежде чем кинестетические сигналы сигнализируют о снижении трения (Öberg 1978; Wallman 1997).
Роль автоматизации в предотвращении возникновения и снижении тяжести аварий
Развертывание автоматизированных систем вождения (например, системы адаптации к дорожным условиям Ленд Ровер Дискавери) считается ключевой мерой для сокращения числа аварий и повышения безопасности дорожного движения (Европейская комиссия 2011; Европейский консультативный совет по исследованиям автомобильного транспорта 2015; Министерство транспорта США 2016; Всемирная организация здравоохранения 2015). Системы автономного экстренного торможения (AEB) были впервые представлены на рынке начиная с 2006 года. Аварийное вмешательство AEB (autonomous emergency braking) сочетается с визуальным / акустическим / тактильным предупреждением, когда риск столкновения превышает определенный уровень, определяемый временем до столкновения (евро NCAP 2015). Все производимые системы AEB сводят к минимуму риск ложных срабатываний (например, торможение в неправильных ситуациях). Надежное, надежное и точное измерение дорожного трения в настоящее время недоступно (Lex 2015). Таким образом, инженеры разрабатывают системы с высоким коэффициентом трения. Там, где обнаружен риск столкновения, используются низкие времена столкновения (TTC). Предупреждения обычно выдаются между 1,5 и 2,5 с TTC, а включение тормоза обычно между 0,8 и 1,2 с TTC.
Исследования показали, что AEB может избежать сбоев или уменьшить их серьезность. AEB является одной из 5 систем с самым высоким рейтингом, которая может предотвратить 22% несчастных случаев со смертельным исходом (Eichberger et al. 2010). Анализ реальных данных о столкновениях показал, что на автомобилях, оснащенных AEB, на 38% меньше задних аварий, чем на аналогичных автомобилях без AEB (Fildes et al. 2015). Было показано, что AEB эффективно снижал 40% смертельно раненых и 27% тяжело раненных пешеходов при лобовых столкновениях с автомобилями с углом обзора 40 ° (Rosén et al. 2010). Тем не менее, исследования также показывают потенциально негативные последствия автоматизации для безопасности дорожного движения, такие как чрезмерное доверие водителей к автоматизации, самодовольство и неспособность взять на себя контроль, когда это необходимо, которые способствуют несчастным случаям (Shen and Neyens 2014). Доверие к автоматизации — это отношение, при котором автоматизация поможет достичь цели в условиях уязвимости и неопределенности (Lee and See 2004). Соответствующий уровень доверия зависит от истинных возможностей автоматизации (Kidd et al. 2017). Доверие влияет на использование автоматизации или ее отсутствие (Parasuraman and Riley 1997).
2010). Анализ реальных данных о столкновениях показал, что на автомобилях, оснащенных AEB, на 38% меньше задних аварий, чем на аналогичных автомобилях без AEB (Fildes et al. 2015). Было показано, что AEB эффективно снижал 40% смертельно раненых и 27% тяжело раненных пешеходов при лобовых столкновениях с автомобилями с углом обзора 40 ° (Rosén et al. 2010). Тем не менее, исследования также показывают потенциально негативные последствия автоматизации для безопасности дорожного движения, такие как чрезмерное доверие водителей к автоматизации, самодовольство и неспособность взять на себя контроль, когда это необходимо, которые способствуют несчастным случаям (Shen and Neyens 2014). Доверие к автоматизации — это отношение, при котором автоматизация поможет достичь цели в условиях уязвимости и неопределенности (Lee and See 2004). Соответствующий уровень доверия зависит от истинных возможностей автоматизации (Kidd et al. 2017). Доверие влияет на использование автоматизации или ее отсутствие (Parasuraman and Riley 1997). Если драйверы имеют низкое доверие к автоматизации, как в случае, когда автоматизация выдает много ложных сигналов тревоги, они могут не использовать ее.
Если драйверы имеют низкое доверие к автоматизации, как в случае, когда автоматизация выдает много ложных сигналов тревоги, они могут не использовать ее.
Автоматизированные функции вождения уровня 1 или 2 SAE (SAE International 2014), доступные в автомобилях серийного производства, не требуют адаптации трения между шиной и дорогой, поскольку водитель несет юридическую ответственность за постоянный мониторинг условий вождения и адаптацию стиля вождения. соответственно. Для уровня SAE 3 и выше, автоматическая функция должна будет адаптироваться к состоянию дороги. При разработке таких адаптивных функций необходимо учитывать как физические, так и человеческие факторы, такие как несовершенная сенсорная информация и восприятие человеком безопасности и доверия к автоматизированным функциям в различных дорожных условиях (Lex et al. 2017). В этом исследовании было показано, что водители в основном полагаются на визуальные сигналы, а также реакцию транспортного средства при оценке дорожных условий, согласно их собственным утверждениям. Отвечая на вопрос о категориях, которые они использовали для разграничения дорожных условий, 24% водителей указали, что они сухие, 22% — мокрые, 19% — ледяные и 13% — снежные, что показывает одинаковое распределение в разных возрастных и гендерных группах (Lex et al. 2017).
Отвечая на вопрос о категориях, которые они использовали для разграничения дорожных условий, 24% водителей указали, что они сухие, 22% — мокрые, 19% — ледяные и 13% — снежные, что показывает одинаковое распределение в разных возрастных и гендерных группах (Lex et al. 2017).
Для дальнейшего понимания человеческого фактора в стратегиях адаптивного вождения по шине и дороге в качестве примера применения используется обычная система AEB City. AEB City обычно работает на более низких скоростях (10–50 км / ч) и предназначен для городского применения (Euro NCAP 2015). Тормозные вмешательства AEB активируются при определенном TTC, который рассчитывается по уравнению (1).
TTC = s/v (1)
где Δs — относительное расстояние, а Δv — относительная скорость между эго и целевой машиной. Значения TTC, используемые в настоящее время традиционными системами AEB на уровне 1 SAE (SAE International 2014), могут избежать аварий на сухих дорогах с высоким коэффициентом трения. Это уместно, потому что AEB должен реагировать в самое позднее возможное время, если водитель не реагирует. Для интервалов автономного торможения на дорогах с низким коэффициентом трения на уровне SAE 3 и выше (SAE International 2014) значения TTC должны быть выше; например, TTC / μ в случае торможения.
Для интервалов автономного торможения на дорогах с низким коэффициентом трения на уровне SAE 3 и выше (SAE International 2014) значения TTC должны быть выше; например, TTC / μ в случае торможения.
Если проект автоматизации направлен на то, чтобы компенсировать человеческие ограничения в управлении автомобилем, особенно в условиях пониженного трения, то необходимо четко учитывать возрастные и гендерные различия. Воспринимаемая полезность, принятие и соответствующий уровень доверия к автоматизированным системам помощи водителями являются необходимыми предпосылками для их покупки и использования. Приемка зависит от отказоустойчивых характеристик автоматизированных систем и от комфорта водителя (Brookhuis et al. 2001). Исследования показывают, что усовершенствованные системы помощи водителю можно было бы улучшить, если бы алгоритмы управления включали индивидуальные предпочтения и условия окружающей среды (Koglbauer et al. 2017; Xiong and Boyle 2012). Теоретически, наибольший потенциал систем помощи водителю в снижении количества аварий может быть в условиях ограниченного дорожного движения (Lex et al. 2013; Niederkofler et al. 2011). Было обнаружено, что увеличение сходства между автоматическим поведением и поведением вождения человека улучшает восприятие автоматизации (Van Driel et al. 2007). Таким образом, автоматизированные системы должны иметь стратегию управления, адаптированную к дорожным условиям, аналогичным человеческим водителям. Кроме того, автоматизированные системы должны быть в состоянии помочь водителям в более раннем восприятии, лучшем понимании и более адекватном реагировании для предотвращения аварий и уменьшения серьезности аварий, которых невозможно избежать. Водители должны быть в состоянии доверять системе автоматизации и чувствовать себя в безопасности с ней.
2013; Niederkofler et al. 2011). Было обнаружено, что увеличение сходства между автоматическим поведением и поведением вождения человека улучшает восприятие автоматизации (Van Driel et al. 2007). Таким образом, автоматизированные системы должны иметь стратегию управления, адаптированную к дорожным условиям, аналогичным человеческим водителям. Кроме того, автоматизированные системы должны быть в состоянии помочь водителям в более раннем восприятии, лучшем понимании и более адекватном реагировании для предотвращения аварий и уменьшения серьезности аварий, которых невозможно избежать. Водители должны быть в состоянии доверять системе автоматизации и чувствовать себя в безопасности с ней.
Целью данного исследования является оценка адаптивных и обычных (неадаптивных) стратегий управления транспортным средством AEB с участием женщин и мужчин из разных возрастных групп в симуляторе вождения (имитируемое высокое и уменьшенное трение и летние и зимние пейзажи). Протестированные системы — это обычная система AEB, которая игнорирует дорожное трение, и новый адаптивный AEB с общим алгоритмом, который включает дорожное трение и адаптирует время вмешательства в торможение таким образом, чтобы избежать столкновения.
Использованные источники
- Andrey J, Mills B, Leahy M, Suggett J. Weather as a chronic hazard for road transportation in Canadian cities. Na Hazards. 2003;28:319–343.
- Black AW, Mote TL. Effects of winter precipitation on automobile collisions, injuries and fatalities in the United States. J Transp Geogr. 2015;48:165–175.
- Brookhuis KA, De Waard D, Janssen WH. Behavioural impacts of advanced driver assistance systems—an overview. European Journal of Transport and Infrastructure Research. 2001;1(3):245–253.
- Eichberger A, Tomasch E, Rohm R, Steffan H, Hirschberg W. Detailed analysis of the benefit of different traffic safety systems in fatal accidents. Paper presented at: 19th Annual EVU Congress; 2010.
- Eisenberg D, Warner KE. Effects of snowfalls on motor vehicle collisions, injuries, and fatalities. Am J Public Health. 2005;95:120–124.
- Euro NCAP. Assessment Protocol—Safety Assist. Version 7.0. 2015. Available at: euroncap. com/en/for-engineers/protocols/safety-assist/. Accessed November 28, 2016.
- European Commission. Roadmap to a Single European Transport Area—Towards a Competitive and Resource Efficient Transport System. Brussels, Belgium: Office for Official Publications of the European Commission; 2011. White Paper COM.
- European Road Transport Research Advisory Council. Automated Driving Roadmap. 2015. Available at: ertrac.org/uploads/documentsearch/id38/ERTRAC_Automated-Driving-2015.pdf. Accessed October 3, 2016.
- Fildes B, Keall M, Bos N, et al. Effectiveness of low speed autonomous emergency braking in real-world rear-end crashes. Accid Anal Prev. 2015;81:24–29.
- Gustafsson F. Slip-based tire–road friction estimation. Automatica. 1997;33:1087–1099.
 com/en/for-engineers/protocols/safety-assist/. Accessed November 28, 2016.
com/en/for-engineers/protocols/safety-assist/. Accessed November 28, 2016. Autonomous emergency braking systems adaptedto snowy road conditions improve drivers’perceived safety and trust
Ioana Koglbauer, Jürgen Holzinger, Arno Eichberger, Cornelia Lex
Заднее автоматическое экстренное торможение — выдающаяся функция безопасности
- Оказывается, когда вы позволяете машине решать, когда вам следует тормозить, это имеет значение.
- Основываясь на страховых претензиях для некоторых автомобилей GM и Subaru, IIHS заявил, что задний AEB может снизить иски о возмещении ущерба на 28 процентов, в то время как резервная камера или эти звуковые датчики уменьшают это всего на 5 процентов.
- Поскольку задний AEB не получил широкого распространения, IIHS заявила, что не собирается использовать его в качестве требования для обозначения Top Safety Pick в ближайшее время.
-2011/1600px/tecnicas--(2).jpg)
Резервное копирование автомобиля часто является безопасным процессом, но, безусловно, может быть и безопаснее. И это так, когда автомобиль оборудован системой автоматического экстренного торможения сзади (AEB). Страховой институт безопасности дорожного движения (IIHS) опубликовал результаты нового исследования, которое показало, что задний AEB помогает сократить количество страховых случаев больше, чем любая другая технология безопасности, которую изучила группа.
Rear AEB использует те же ультразвуковые датчики, которые во многих транспортных средствах издают звуковой сигнал водителю, если на пути движущегося автомобиля что-то есть, но буква «A» означает, что транспортное средство автоматически остановится, если оно определит, что вот-вот столкнется с объектом. Это небольшое, но важное изменение снижает количество исков о возмещении имущественного ущерба на 28 процентов, а количество исков о сговоре — на 10 процентов, как выяснил IIHS. По сравнению с другими технологиями резервной безопасности, которые помогают предотвратить инциденты, ни одна из них не является столь же эффективной, как задний AEB. Камеры заднего вида и датчики парковки, например, уменьшили количество исков о материальном ущербе на 5 процентов и оказали минимальное влияние на иски о сговоре.
Это небольшое, но важное изменение снижает количество исков о возмещении имущественного ущерба на 28 процентов, а количество исков о сговоре — на 10 процентов, как выяснил IIHS. По сравнению с другими технологиями резервной безопасности, которые помогают предотвратить инциденты, ни одна из них не является столь же эффективной, как задний AEB. Камеры заднего вида и датчики парковки, например, уменьшили количество исков о материальном ущербе на 5 процентов и оказали минимальное влияние на иски о сговоре.
IIHS
«Когда вы сравниваете автомобили с [задним AEB] и автомобили без него, мы видим значительное сокращение частоты страховых случаев, большее, чем сокращение, которое мы наблюдаем для других технологий», — Джо Янг, директор по связям со СМИ IIHS, сказал Автомобиль и водитель.
Subaru
IIHS впервые рассчитал данные по страховым случаям для автомобилей с технологией AEB в задней части кузова в 2017 году, используя цифры для автомобилей General Motors 2015 года (и некоторых из них — за 2013 и 2014 годы), включая Cadillac ATS, CTS, SRX, XTS и Escalade.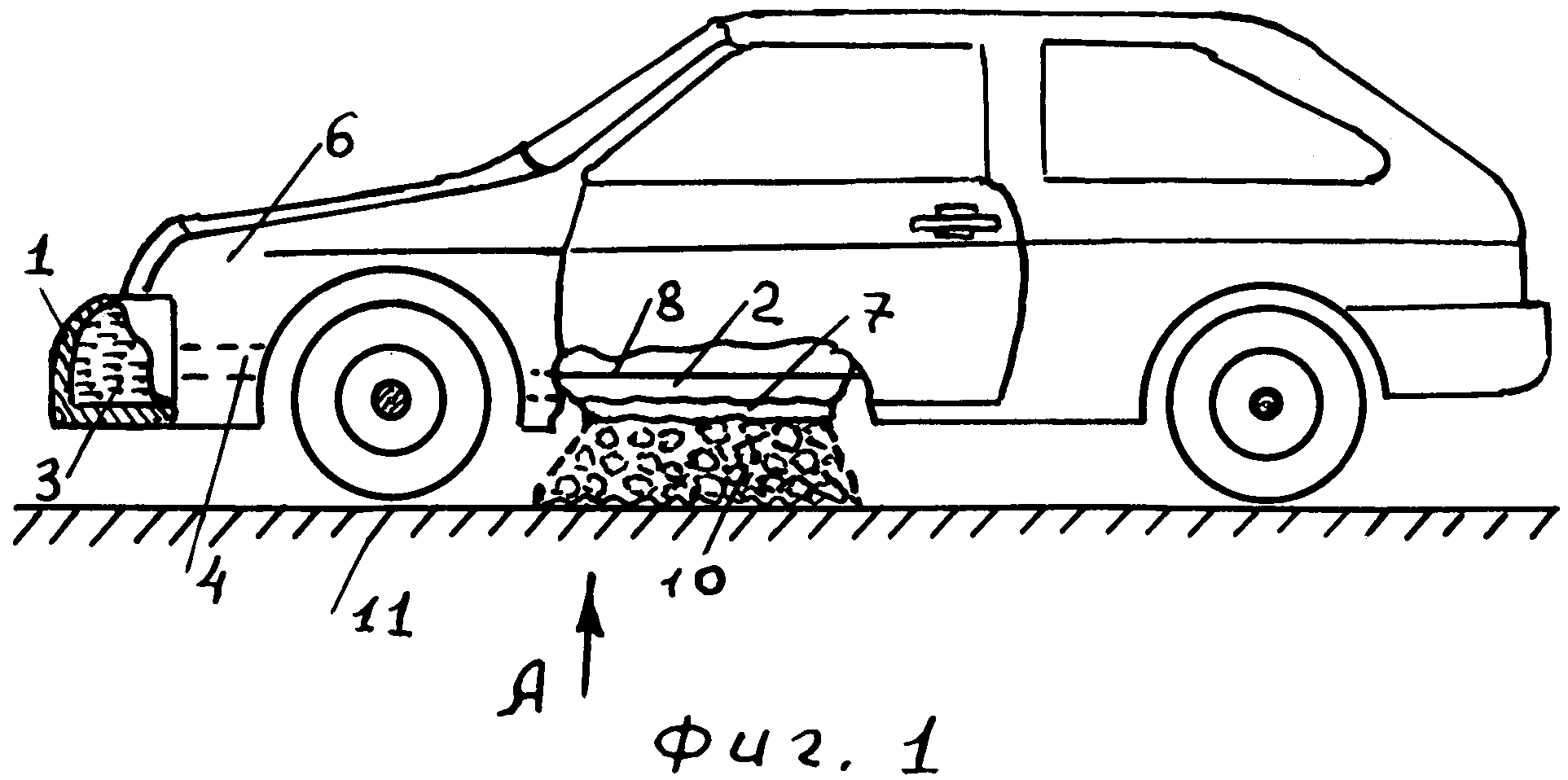 Новое исследование добавляет подробную информацию о Subaru модельного года 2015–2018, включая Legacy, Outback, Forester, Impreza и Crosstrek.Эти два автопроизводителя были выбраны потому, что они смогли предоставить IIHS данные на уровне функций, необходимые для анализа чисел.
Новое исследование добавляет подробную информацию о Subaru модельного года 2015–2018, включая Legacy, Outback, Forester, Impreza и Crosstrek.Эти два автопроизводителя были выбраны потому, что они смогли предоставить IIHS данные на уровне функций, необходимые для анализа чисел.
Несмотря на резкое влияние заднего AEB на страховые возмещения, эта технология доступна только примерно в 30% моделей 2020 года, как стандартное, так и дополнительное оборудование, сказал Янг. В настоящее время IIHS не настаивает на внесении каких-либо нормативных изменений в отношении заднего AEB и не планирует в ближайшем будущем включать его в оценки группы Top Safety Pick.IIHS действительно использует эффективность предотвращения лобового столкновения при принятии решения о том, какие автомобили будут названы получателями Top Safety Pick или Top Safety Pick +. Он также ведет список автопроизводителей, которые выполнили ранее взятые на себя обязательства, приняв передний или задний AEB.
«Мы надеемся, что автопроизводители увидят явную выгоду для своих клиентов и добавят эту технологию в большее количество автомобилей», — сказал он.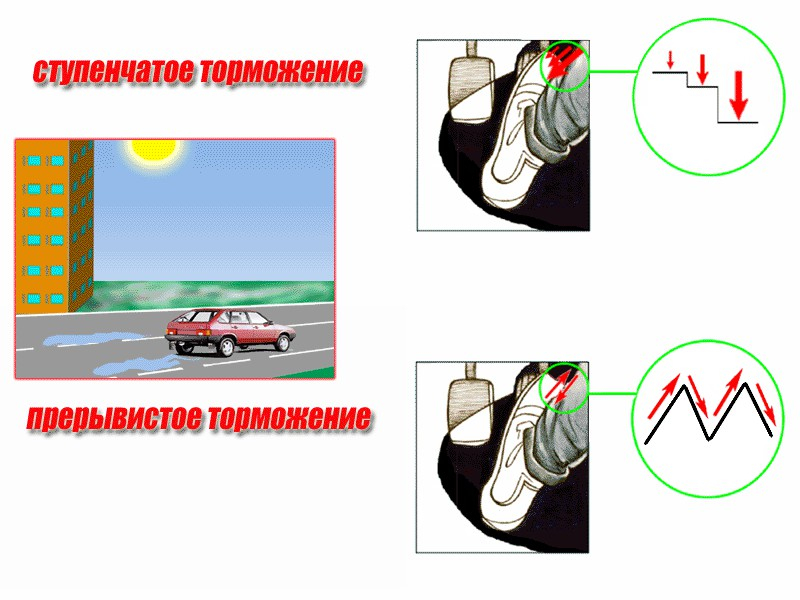 «Хотя у нас есть некоторые рейтинги для систем заднего AEB, учитывая, что эта технология не так широко распространена, на данный момент это не является основным направлением нашего тестирования.. . Мы надеемся, что больше автопроизводителей добавят эту технологию, поскольку потенциал явно довольно велик ».
«Хотя у нас есть некоторые рейтинги для систем заднего AEB, учитывая, что эта технология не так широко распространена, на данный момент это не является основным направлением нашего тестирования.. . Мы надеемся, что больше автопроизводителей добавят эту технологию, поскольку потенциал явно довольно велик ».
Хотя точные цифры не являются общедоступными, Янг сказал, что маловероятно, что добавление заднего AEB будет большими расходами для автопроизводителей, поскольку стоимость добавления заднего AEB составляет часто в комплекте с другими технологиями и полагается на ультразвуковые датчики парковки, которые уже являются стандартными или дополнительными на многих новых транспортных средствах. Этот контент импортирован из {embed-name}. Вы можете найти тот же контент в другом формате или найти дополнительную информацию на их веб-сайте.
Этот контент создается и поддерживается третьей стороной и импортируется на эту страницу, чтобы помочь пользователям указать свои адреса электронной почты. Вы можете найти больше информации об этом и подобном контенте на сайте piano.io.
Вы можете найти больше информации об этом и подобном контенте на сайте piano.io.
10 автопроизводителей досрочно выполнили обязательство по автоматическому экстренному торможению
Десять автопроизводителей с опережением графика выполнили добровольное обязательство оснастить почти все новые легковые автомобили автоматическим экстренным торможением.17 декабря 2020
Десять автопроизводителей выполнили добровольное обязательство оснастить почти все новые легковые автомобили, которые они производят для рынка США, автоматическим экстренным торможением (AEB), что значительно опережает целевой показатель на 2022–2023 годы.
Десять производителей используют эту технологию для более чем 95 процентов автомобилей, произведенных в период с 1 сентября 2019 года по 31 августа 2020 года. Еще три автопроизводителя превысили 90-процентный порог. Однако пять из 20 автопроизводителей, подписавших это обязательство, оснастили AEB менее половины своих автомобилей.
Из 10 автопроизводителей, выполнивших свои обязательства досрочно, четыре — Audi, Mercedes-Benz, Volvo и Tesla — выполнили это в прошлом году, согласно отчетам производителей. В этом году к ним присоединились BMW, Hyundai, Mazda, Subaru, Toyota и Volkswagen.
Отчеты ежегодно представляются 20 производителями, которые обязались оснастить не менее 95 процентов своих легковых и грузовых автомобилей с полной массой 8 500 фунтов или меньше технологией предотвращения столкновений к началу производственного года, начиная с сентября.1, 2022 год. В 2015 году это обязательство взяли на себя Страховой институт безопасности дорожного движения и Национальное управление безопасности дорожного движения (НАБДД).
«Эти добровольные усилия позволяют быстро внедрить важную технологию предотвращения аварий в транспортных средствах», — сказал президент IIHS Дэвид Харки. «Приятно видеть, что AEB стала основной функцией безопасности, которая теперь входит в стандартную комплектацию не только роскошных автомобилей и внедорожников, но и доступных моделей».
В дополнение к 10 производителям, которые уже выполнили обязательства AEB, еще три — Ford, Honda и Nissan — внедрили эту технологию в 9 из 10 автомобилей, произведенных ими в прошлом году.В середине списка оказались два автопроизводителя: Kia за последний год оснастила 75 процентов своих автомобилей системой AEB, за ней следует Porsche с 55 процентами.
В добровольном обязательстве не указаны этапы ввода в эксплуатацию, но Fiat Chrysler, General Motors, Jaguar Land Rover, Maserati и Mitsubishi должны наверстать упущенное, чтобы достичь цели 2022–2023 годов для легковых автомобилей. В прошлом году они оснастили менее половины произведенных ими устройств системой AEB, которая соответствует требованиям добровольного обязательства.
«Многие автопроизводители проявили изобретательность и ловкость, сделав систему AEB для городских скоростей стандартом. NHTSA должно развить этот прогресс, обеспечив к 2025 году стандартную комплектацию всех новых транспортных средств более совершенными системами, которые также могут обнаруживать пешеходов и работать на скоростях шоссе », — сказал Дэвид Фридман, вице-президент по защите прав потребителей Consumer Reports. «Те немногие автопроизводители, которые сильно отстают от своих обязательств в отношении AEB, и особенно Fiat Chrysler, должны четко изложить, как они выйдут и превзойдут нынешнюю отрасль.”
«Те немногие автопроизводители, которые сильно отстают от своих обязательств в отношении AEB, и особенно Fiat Chrysler, должны четко изложить, как они выйдут и превзойдут нынешнюю отрасль.”
Информация, собранная Consumer Reports, показывает, что все больше автопроизводителей делают стандартное оборудование городской скорости AEB на 100% своих моделей, гарантируя, что технология будет включена во все новые автомобили. Шесть автопроизводителей сделают это в 2021 модельном году по сравнению с двумя автопроизводителями в 2020 модельном году. Это увеличение свидетельствует о растущем понимании автопроизводителями того, что их клиенты ожидают, что AEB станет стандартом для любого нового автомобиля, который они могут купить.
Из всех компаний Ford зафиксировал одно из самых больших ежегодных улучшений в части автомобилей, оснащенных AEB, достигнув 91 процента в 2020 году по сравнению с 65 процентами в 2019 году и всего 6 процентами годом ранее.Ford также находится в авангарде следующего этапа своих обязательств — установки AEB на автомобили весом от 8 501 до 10 000 фунтов к 2025-26 годам. Ford оснастил 62% этих тяжелых автомобилей системой AEB.
Ford оснастил 62% этих тяжелых автомобилей системой AEB.
Из четырех других автопроизводителей, которые сообщили о производстве автомобилей в этом диапазоне веса для рынка США за последний год, Fiat Chrysler был на 11%, а Nissan — на 9%. Mercedes-Benz и General Motors были на нуле.
В соответствии с условиями добровольного обязательства производители должны подтвердить, что система AEB на их автомобилях соответствует определенным стандартам производительности как для предупреждения о лобовом столкновении (FCW), так и для автоматического экстренного торможения.FCW должен соответствовать подмножеству текущих требований программы NHTSA по оценке безопасности 5 звезд в отношении сроков оповещения водителей. AEB должен получить, по крайней мере, высокий рейтинг в текущих тестах IIHS на предотвращение столкновений на треке. Базовыми показателями производительности для этих тестов являются снижение скорости не менее чем на 10 миль в час в тестах IIHS на 12 или 25 миль в час или снижение скорости на 5 миль в час в обоих тестах.
Ожидается, что добровольное обязательство предотвратит 42 000 аварий и 20 000 травм к 2025 году.Оценка основана на исследовании IIHS, которое обнаружило, что системы предотвращения столкновения спереди с предупреждением о лобовом столкновении и с автоматическим экстренным торможением сокращают количество аварий с задним ходом вдвое.
| Процент автомобилей, произведенных с 1 сентября по 31 августа с использованием AEB, по данным производителя, для легковых автомобилей весом 8 500 фунтов или менее | Процент моделей 2021 года со стандартным AEB, согласно данным Consumer Reports | ||
|---|---|---|---|
| 2019 | 2020 | 2021 | |
| тесла | 100 | 100 | 100 |
| Volvo | 100 | 100 | 100 |
| Audi | 99 | 99 | 83 |
| BMW | 84 | 99 | 94 |
| Субару | 84 | 99 | 57 1 |
| Volkswagen | 92 | 98 | 89 |
| Мерседес-Бенц | 99 | 97 | 94 |
| Тойота / Лексус | 92 | 97 | 100 |
| Hyundai / Genesis | 78 | 96 | 93 |
| Мазда | 80 | 96 | 100 |
| Хонда / Акура | 86 | 94 | 86 |
| Ниссан / Инфинити | 86 | 93 | 82 2 |
| Форд / Линкольн | 65 | 91 | 83 |
| Киа | 59 | 75 | 50 2 |
| Порше | 38 | 55 | 50 |
| Мазерати | 69 | 48 | 33 |
| Дженерал Моторс | 29 | 47 | 50 |
| Митсубиси | 5 | 39 | 100 |
| Fiat Крайслер | 10 | 14 | 20 2 |
| Ягуар Ленд Ровер | 0 | 0 | 100 3 |
1 Пакет помощи водителю Subaru, который включает AEB, входит в стандартную комплектацию всех новых автомобилей с бесступенчатой трансмиссией (CVT), но не предлагается на автомобилях с механической коробкой передач. Три модели Subaru поставляются со стандартной механической коробкой передач и требуют доплаты за вариатор. По условиям добровольного обязательства автопроизводители могут отложить оснащение автомобилей с механической коробкой передач системой AEB до 2024-25 производственного года.
Три модели Subaru поставляются со стандартной механической коробкой передач и требуют доплаты за вариатор. По условиям добровольного обязательства автопроизводители могут отложить оснащение автомобилей с механической коробкой передач системой AEB до 2024-25 производственного года.
2 Процентная доля приходится на модели 2021 года автопроизводителя, спецификации которых известны по состоянию на 11 декабря 2020 года, но еще не на все модели 2021 года, предлагаемые автопроизводителем. В CR отсутствуют спецификации для двух моделей от Kia, одной от Nissan и всех моделей Fiat.
3 Jaguar Land Rover не сообщил, что его модели с AEB соответствуют требованиям к характеристикам, изложенным в добровольном обязательстве.
Автоматическое экстренное торможение — Центр автобезопасности
Когда все сделано правильно, технология автоматического экстренного торможения (AEB) спасает жизни. Это один из самых значительных достижений в области технологий безопасности автомобилей за последние десятилетия.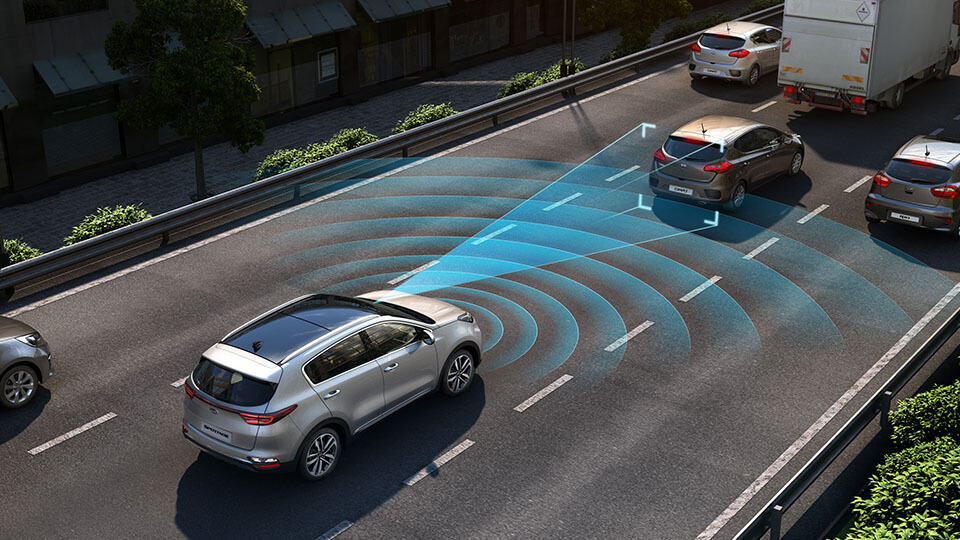 Соответственно, Центр автомобильной безопасности последние несколько лет боролся за то, чтобы эта спасающая жизнь технология стала стандартом для всех новых автомобилей.Однако, когда автоматическое экстренное торможение выходит из строя, это может быть невероятно опасно. Владельцы Nissan Rogues 2017-19 годов, оснащенные системой автоматического экстренного торможения, сообщали о нежелательных остановках с тех пор, как на этих автомобилях была установлена технология AEB. Хотя Nissan признал этот недостаток в своей системе AEB, они еще не выпустили отзыв, что подвергает водителей, пассажиров, пешеходов и велосипедистов риску из-за неисправной технологии. Центр будет продолжать настаивать на том, чтобы эта технология стала доступной для всех американских водителей, а автопроизводители — правильно.
Соответственно, Центр автомобильной безопасности последние несколько лет боролся за то, чтобы эта спасающая жизнь технология стала стандартом для всех новых автомобилей.Однако, когда автоматическое экстренное торможение выходит из строя, это может быть невероятно опасно. Владельцы Nissan Rogues 2017-19 годов, оснащенные системой автоматического экстренного торможения, сообщали о нежелательных остановках с тех пор, как на этих автомобилях была установлена технология AEB. Хотя Nissan признал этот недостаток в своей системе AEB, они еще не выпустили отзыв, что подвергает водителей, пассажиров, пешеходов и велосипедистов риску из-за неисправной технологии. Центр будет продолжать настаивать на том, чтобы эта технология стала доступной для всех американских водителей, а автопроизводители — правильно.
На это ушло шесть месяцев, но НАБДД удовлетворило ходатайство Центра и обнаружило, что именно по этому поводу было подано более 800 жалоб. Тем не менее, после года приостановки работы Nissan, подачи Центром запроса и апелляции по Закону о свободе информации, а также нескольких судебных исков на этой неделе общественность наконец узнала, что скрывает Nissan: что Nissan известно о более чем 1400 сообщениях только о Rogue AEB.
 — в 15 раз больше первоначального количества известных жалоб.
— в 15 раз больше первоначального количества известных жалоб.Nissan признает более 1400 сообщений о неисправности системы автоматического экстренного торможения, но продолжает отказываться от отзыва. 6 августа 2020 г.
Хотя мы рады, что NHTSA наконец-то начало официальное расследование на основании нашей петиции, это не должно задерживать Nissan более серьезно относиться к опасности, которую фантомное торможение представляет для всех на дороге. Эта проблема заслуживает отзыва, и все владельцы Nissan должны как можно скорее получить исправное и постоянное решение.
NHTSA подает петицию Центру автобезопасности на расследование системы автоматического экстренного торможения Nissan Rogue. 12 сентября 2019 г.
Сегодня Центр автомобильной безопасности («Центр») обратился в Национальную администрацию безопасности дорожного движения (NHTSA) с ходатайством о начале расследования дефекта безопасности в связи с ложной активацией системы автоматического экстренного торможения (AEB), из-за которой владельцы мошенников и другие участники дорожного движения в опасности.

Центр автобезопасности обращается к NHTSA для расследования неисправности системы автоматического экстренного торможения на автомобилях Nissan Rogue 2017–2018 годов. 21 марта 2019.
Защитники прав потребителей подали в суд на NHTSA за игнорирование петиции об автоматическом экстренном торможении. 30 ноября 2016 года.
CAS призывает NHTSA-Auto Industry Secret Automatic Emergency Braking (AEB) для безопасной продажи. 17 марта 2016 г.
NHTSA удовлетворяет петицию CAS об автоматическом предотвращении лобового столкновения тяжелых грузовиков. 16 октября 2015 г.
Заявление CAS о приверженности DOT и автопроизводителей использованию автоматического экстренного торможения. 11 сентября 2015 г.
Защитники прав потребителей просят Агентство по безопасности автомобилей сделать новые технологии стандартным оборудованием. 13 января 2015 г.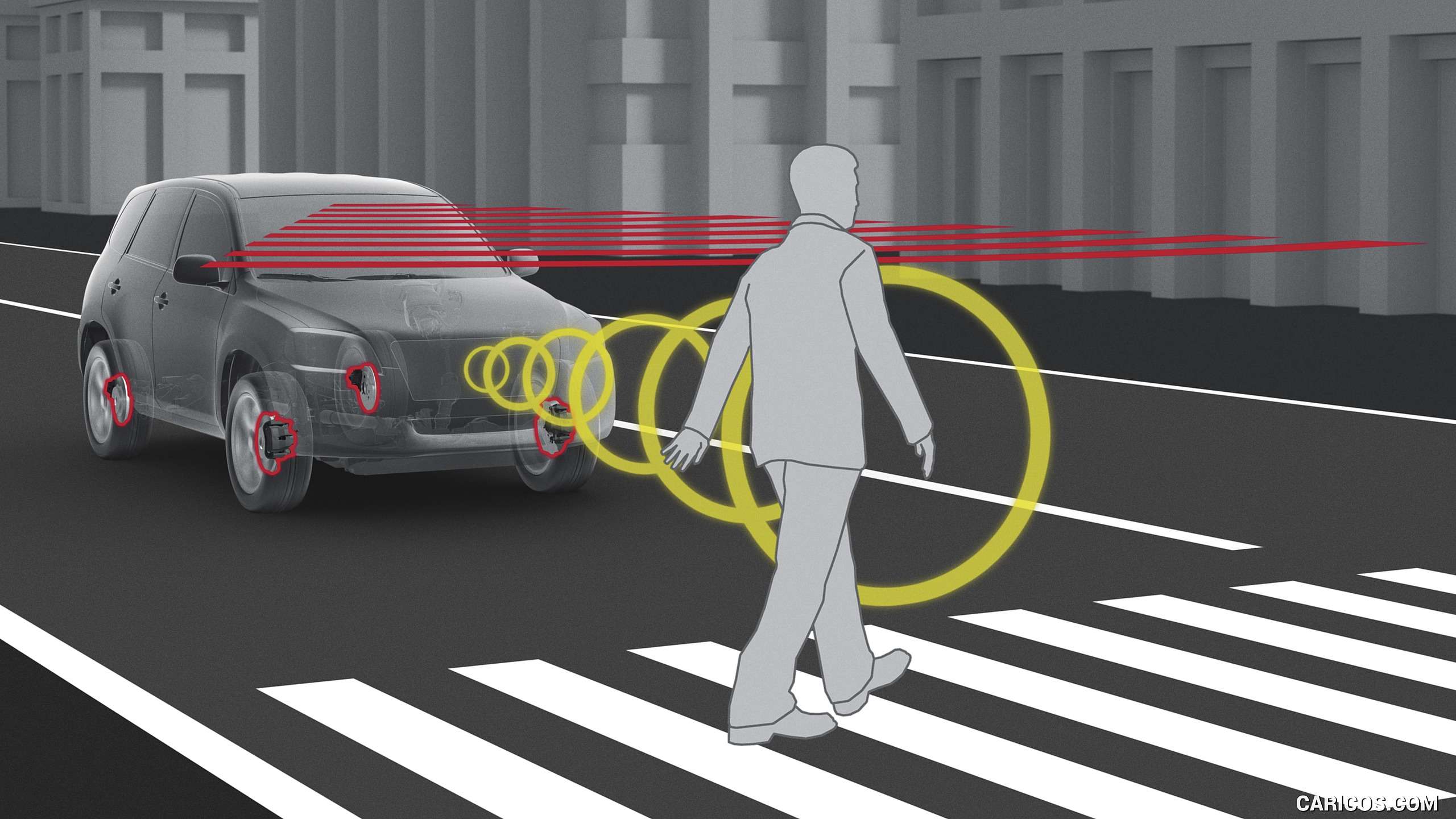
Государственная организация по безопасности расследует проблемы экстренного торможения Nissan Rogue. ABC 7 Чикаго. 23 сентября 2019 г.
Федеральные органы власти усиливают расследование по безопасности системы автоматического торможения Nissan. WSJ. 12 сентября 2019 г.
США проверяют 553 000 внедорожников Nissan Rogue на предмет непреднамеренного экстренного торможения. Рейтер. 12 сентября 2019 г.
Автоматическое экстренное торможение повышает безопасность, но есть жалобы на ложные срабатывания. WTOP. 31 августа 2019 г.
По мере того, как автоматическое торможение становится все более распространенным явлением в автомобилях, жалобы водителей также растут. Wall Street Journal. 27 августа 2019 г.
Датчики Nissan Rogue вышли из строя: водители говорят, что датчики вызывают внезапные остановки. ABC7 Чикаго. 9 июля 2019 года.
ABC7 Чикаго. 9 июля 2019 года.
Nissan Canada отозвала 90 000 мошенников из-за непреднамеренного торможения. Автомобильные новости Канады. 12 апреля 2019 г.
2017-2018 Система автоматического экстренного торможения Nissan Rogue представляет собой «неоправданный риск», — заявляет группа по безопасности. Форбс. 29 марта 2019 года.
40 стран согласны с тем, что автомобили должны иметь автоматическое торможение. Ассошиэйтед Пресс. 12 февраля 2019 г.
Автоматическое торможение для автомобилей: частные разговоры о темпах технологий. Business Insider. 17 февраля 2016 г.
НАБДД удовлетворяет петицию о создании правил, которые предусматривают системы предотвращения столкновений. 16 октября 2015 г.
Автопроизводители обещают тормозить при наезде сзади. LA Times. 11 сентября 2015 года.
Автоматическое экстренное торможение станет стандартной функцией
Национальная администрация безопасности дорожного движения (NHTSA) и Страховой институт дорожной безопасности (IIHS) недавно заключили сделку с 20 автопроизводителями, чтобы сделать системы автоматического экстренного торможения (AEB) стандартной функцией практически для всех автомобилей. все новые автомобили к концу 2022 года, за ними последуют легкие и некоторые средние грузовики в 2025 году.
Автопроизводители, участвующие в сделке: Audi, BMW, Fiat Chrysler Automobile (FCA), Ford Motor Co., General Motors, Honda, Hyundai, Jaguar Land Rover, Kia, Maserati, Mazda, Mercedes-Benz, Mitsubishi Motors, Nissan, Porsche, Subaru, Tesla Motors Inc., Toyota, Volkswagen и Volvo Car USA.
NHTSA заявило, что AEB станет стандартом в рамках этого соглашения для большинства легковых и грузовых автомобилей малой грузоподъемности с полной массой (GVW) 8 500 фунтов. или меньше, начиная не позднее 1 сентября 2022 г. AEB будет стандартным практически на всех грузовиках с полной массой от 8 501 фунт. и 10000 фунтов. начало не позднее сент.1, 2025.
AEB будет стандартным практически на всех грузовиках с полной массой от 8 501 фунт. и 10000 фунтов. начало не позднее сент.1, 2025.
NHTSA, соглашение сделает стандарт AEB на новые автомобили на три года быстрее, чем это может быть достигнуто в рамках официального процесса регулирования.
«Мы внедряем эти системы безопасности в автомобили намного быстрее, чем это было бы возможно в противном случае», — сказал в своем заявлении администратор NHTSA Марк Розекинд. «Обязательства такого масштаба беспрецедентны, и они скорее принесут большую безопасность большему количеству американцев».
Исполнительный вице-президент и главный научный сотрудникIIHS Дэвид Зуби отметил, что системы AEB помогают предотвратить аварии или снизить их серьезность, применяя тормоза для водителя.
Используя автомобильные датчики, такие как радар, камеры или лазеры, для обнаружения неизбежной аварии, система может как предупредить водителя, так и задействовать тормоза, если водитель не предпримет необходимых действий достаточно быстро, сказал он.
«Преимущества этого обязательства очень велики», — добавил Зуби. «От предотвращенных травм и смертей к восстановлению производительности, которая в противном случае была бы потеряна в пробках, вызванных предотвращенными авариями».
Председатель правления IIHS и генеральный директор American Family Insurance Джек Зальцведель отметил, что снижение страховых взносов может быть еще одним долгосрочным преимуществом этой технологии.
«Широкомасштабное развертывание AEB позволит нам дополнительно оценить эффективность технологии и ее влияние на страховые убытки, чтобы больше страховщиков могли изучить возможность предложения скидок или более низких премий для потребителей, которые выбирают автомобили с AEB», — пояснил он.
Автоматическое экстренное торможение в автомобилях будет стандартным к 2022 году, но ложные срабатывания по-прежнему вызывают беспокойство.
Автоматическое экстренное торможение станет стандартным для большинства автомобилей в 2022 году. Ожидается, что эта технология сократит количество задних аварий вдвое, но сотни водителей говорят, что иногда система хлопает по тормозам — видимо, без всякой причины.
Ожидается, что эта технология сократит количество задних аварий вдвое, но сотни водителей говорят, что иногда система хлопает по тормозам — видимо, без всякой причины.
CBS News обнаружила сообщения о нескольких авариях и травмах, в которых водители обвиняли ложное срабатывание систем экстренного автоматического торможения. Защитники безопасности и автопроизводители говорят, что в подавляющем большинстве случаев это работает, но не идеально.
У Синди Уолш, садясь за руль Nissan Rogue 2018 года, повышается уровень беспокойства. Она сказала корреспонденту CBS News Крису Ван Кливу, что с тех пор, как она купила внедорожник новым в октябре прошлого года, он трижды ударил по тормозам без ясной причины, когда она сказала, что риска столкновения нет.
«Первый, я ехал по четырехполосному шоссе, идущему около 55, и он полностью остановился», — сказал Уолш. Теперь она сказала, что боится водить машину, поэтому не водит ее.
Уолш каждый раз брал его к дилеру. Она сказала, что дважды ей сказали, что починили.
Она сказала, что дважды ей сказали, что починили.
Национальное управление безопасности дорожного движения (NHTSA) в настоящее время расследует Rogue 2017 и 2018 годов после получения информации о почти 850 жалобах на ложное срабатывание автоматической тормозной системы внедорожника.Сюда входят сообщения о 14 авариях и пяти травмах.
Актуальные новости
Rogue, как и около половины проданных новых автомобилей, оснащен технологией предотвращения лобовых столкновений, включая автоматическое экстренное торможение. Он должен подавать сигнал тревоги и автоматически тормозить, если вы собираетесь задеть другой автомобиль. Через три года она станет стандартной для большинства автомобилей.
«Люди [говорили], что выключают его… Технология может помочь и действительно спасает вас и предотвращает сбои, но только если она включена и только если она работает», — сказал Джейсон Левин из Центра автобезопасности.«Мы хотим очень быстро увидеть этот шаг к отзыву».
Страховой институт дорожной безопасности (IIHS) заявил, что автоторможение делает вождение более безопасным. По оценкам, эта технология может сократить вдвое наезды сзади, предотвратив 28 000 аварий и 12 000 травм к 2025 году.
«Эти автономные системы экстренного торможения, они есть «Они работают в реальном мире. Но определенно есть возможности для улучшения», — сказал Дэвид Эйлор, менеджер IIHS по активному тестированию безопасности.
С 2015 года было произведено семь отзывов из-за проблем с автоматическим торможением, что затронуло почти 180 000 автомобилей. Более полумиллиона Nissan Rogue подлежат расследованию NHTSA. Регулятор также получил сотни жалоб на так называемое «фантомное торможение» в автомобилях от ряда автопроизводителей.
«Это случилось с нами в прошлом году. Мы ехали на Tesla Model 3 с автопилотом», — сказал редактор CNET Roadshow Тим Стивенс. «Автомобиль нажал на тормоза, когда мы подъехали к эстакаде на оживленной автостраде Нью-Джерси. «
«
« Возможно, он на самом деле видел этот мост как еще одну машину », — добавил он.« И еще один пример того, что автопилот не идеален ».
В заявлении Nissan признали, что некоторые водители-мошенники могут испытывать« ложную активацию », говоря: «Nissan заботится о безопасности наших клиентов и их пассажиров. Компания Nissan тщательно исследовала проблему ложной активации своей системы автоматического экстренного торможения (AEB) и после консультаций с NHTSA начала полевые мероприятия, уведомляя затронутых клиентов об обновлении программного обеспечения, которое улучшает производительность системы Rogue AEB / FEB MY17-18.На некоторых затронутых транспортных средствах владельцы транспортных средств могут столкнуться с ложным срабатыванием системы AEB в уникальных дорожных условиях, таких как определенные железнодорожные переезды, мосты и низко расположенные светофоры. Обновление системного программного обеспечения FEB / AEB предназначено для улучшения функциональности системы. Клиентам предлагается доставить свой автомобиль в авторизованный дилерский центр Nissan, где обновление будет применено бесплатно ».
Клиентам предлагается доставить свой автомобиль в авторизованный дилерский центр Nissan, где обновление будет применено бесплатно ».
Уолш не убежден.« Я больше не чувствую себя в безопасности за рулем. Я не чувствую себя в безопасности, помещая туда свою семью, поэтому мне не нужна машина », — сказала она.
Что касается автомобиля Уолша, автопроизводитель сказал: «Nissan не будет комментировать предмет ожидающего судебного иска клиента».
Автопроизводители настаивают на том, что эта технология спасет жизни и продолжает совершенствоваться. Но федерального стандарта нет, поэтому каждая система немного отличается. У автопроизводителей есть как минимум 49 различных названий технологий.
Дополнительные автопроизводители, у которых были жалобы на фантомное автоторможение, сообщенные в NHTSA, ответили на запрос CBS News о комментариях:
Fiat Chrysler Automobiles (FCA): « автомобилей FCA соответствуют или превышают все федеральные правила безопасности. Тем не менее, мы постоянно следим за их работой на местах и соответствующим образом реагируем. Безопасность транспортных средств является главным приоритетом для FCA ».
Тем не менее, мы постоянно следим за их работой на местах и соответствующим образом реагируем. Безопасность транспортных средств является главным приоритетом для FCA ».
Toyota:« Мы по-прежнему привержены цели добровольного автоматического экстренного торможения (AEB) NHTSA, установленной в 2016 году, и мы сделали AEB стандартом для большей части нашего модельного ряда. По оценкам IIHS, AEB может помочь предотвратить 28 000 аварий и 12 000 травм к 2025 году. «
Mercedes:« Сначала я хотел бы отметить, что эти системы представляют собой системы помощи водителю , которые, попросту говоря, не предназначены для замены. обязанностей водителя.Следует также отметить, что все такие вспомогательные системы могут быть отключены водителем. Так, например, если активная система экстренного торможения активируется из-за того, что обнаруживает опасную или неоднозначную ситуацию, все, что нужно сделать водителю, — это подать газ, и автомобиль снова набирает скорость.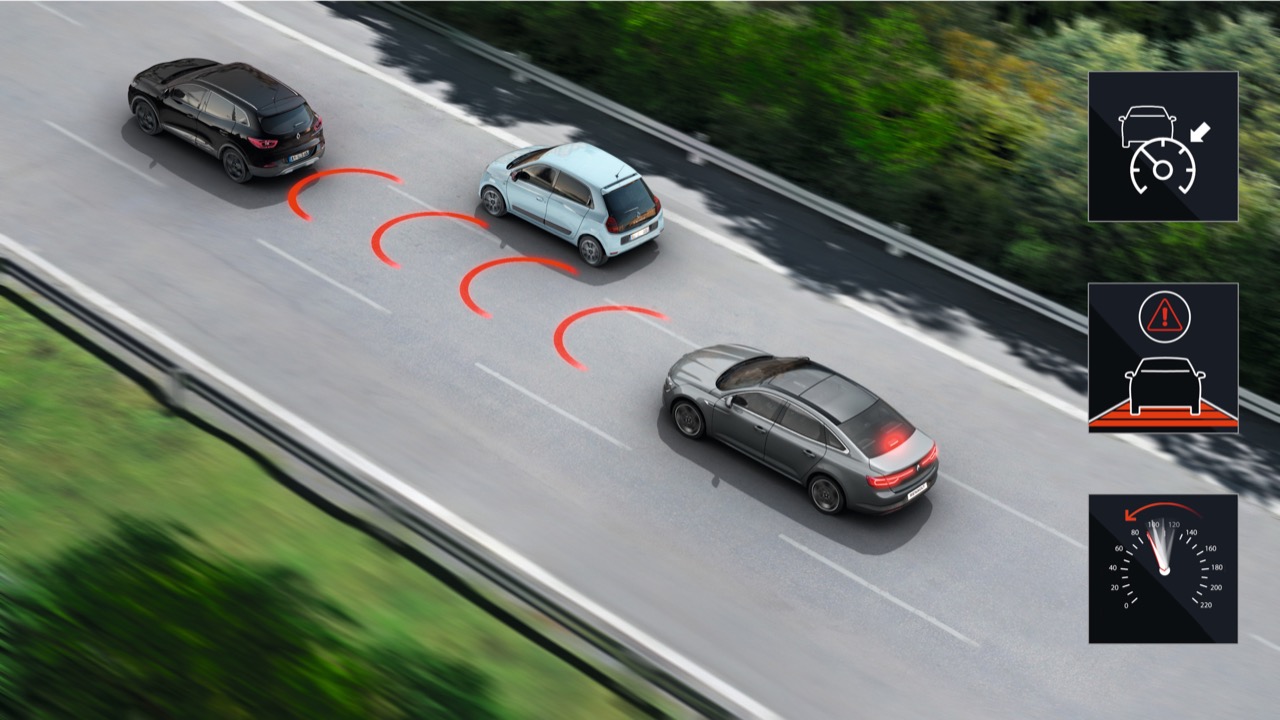
«Что касается отчетов о предполагаемой проблеме самопроизвольного торможения, которую вы цитируете ниже, мы не видели ни одного подтвержденного ее случая. Скорее, например, когда задействованная система обнаружила, что транспортное средство приближается слишком быстро к идущему впереди транспортному средству. из этого.Если водитель хочет быть ближе, чем того требуют соображения безопасности, он или она может просто нажать на педаль газа и отключить систему.
«Эти системы становятся все более и более сложными. Более того, улучшенные версии будут по-прежнему извлекать выгоду из новых входных данных и смогут более точно оценивать все более широкий спектр ситуаций, которые могут возникнуть».
Honda: «Чтобы показать вам, что именно мы рассказываем владельцам автомобилей о нашей версии автоматического экстренного торможения, я приложил соответствующие страницы из Руководства владельца Honda Accord 2020 года.Мы называем нашу систему Тормозной системой предотвращения столкновений (CMBS) и открыто заявляем о ее потенциальных ограничениях. На странице 513 под заголовком «Важное напоминание о безопасности» говорится: «Система CMBS предназначена для снижения серьезности неизбежного столкновения. Она не предотвращает столкновение и не останавливает автомобиль автоматически. Вы по-прежнему обязаны задействовать тормоз. педаль и рулевое колесо в соответствии с условиями движения.
На странице 513 под заголовком «Важное напоминание о безопасности» говорится: «Система CMBS предназначена для снижения серьезности неизбежного столкновения. Она не предотвращает столкновение и не останавливает автомобиль автоматически. Вы по-прежнему обязаны задействовать тормоз. педаль и рулевое колесо в соответствии с условиями движения.
«CMBS использует комбинацию радара дальнего обзора и камер в попытке обнаружить потенциальные столкновения с транспортными средствами, пешеходами или объектами, но она не способна обнаруживать все каждый раз.В зависимости от условий (см. Стр. 517-519) он также может быть не в состоянии остановить автомобиль перед столкновением. Таким образом, мы рекомендуем водителям внимательно следить за автомобилем и всегда держать его под контролем. Поскольку в исследовании AAA проводится тестирование пешеходов, обратите особое внимание на ограничения, перечисленные на странице 519.
«CMBS может также активироваться в тех случаях, когда водители не считают, что это необходимо, и в нашем Руководстве для владельцев представлены несколько таких потенциальных сценариев.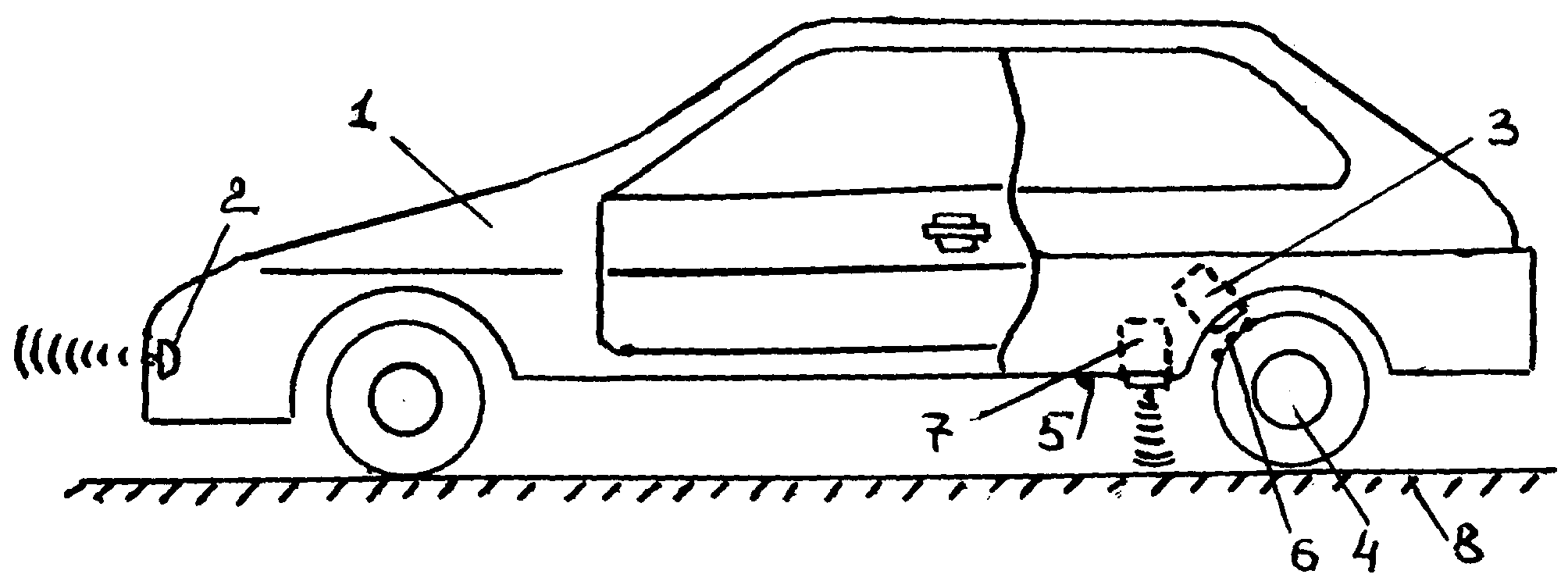 на страницах 520-521.
на страницах 520-521.
«В конечном итоге CMBS призвана помочь водителю снизить серьезность потенциально неизбежного столкновения.В то время как исследования в отношении настоящих автоматизированных транспортных средств в будущем продолжаются, CMBS еще не является автоматизированной автомобильной технологией, способной управлять транспортным средством без присмотра. Таким образом, мы рекомендуем водителям сосредоточиться на задаче вождения и постоянно контролировать свой автомобиль ».
Volkswagen: « В Volkswagen Group of America мы гордимся своей технологией безопасности транспортных средств и очень бережно относимся к безопасности клиентов. шутки в сторону. Хотя мы по-прежнему уверены в наших системах безопасности, таких как автономное экстренное торможение, мы продолжаем полностью сотрудничать с НАБДД и другими соответствующими агентствами для оценки этих важных, а в некоторых случаях и спасающих жизнь технологий.»
Системы автоматического экстренного торможения спасают жизни, экономят деньги
У автоматических систем экстренного торможения есть два преимущества. Они спасают жизни и экономят деньги.
Они спасают жизни и экономят деньги.
Согласно только что опубликованному анализу, проведенному Институтом данных о потерях на дорогах (HLDI), системы переднего автоматического экстренного торможения (AEB) предлагают больше преимуществ для спасения жизни, в то время как задние автоматические тормозные системы ограничивают сбои, вызванные задним ходом. Устранение этих относительно незначительных происшествий при движении задним ходом не предотвращает многих травм или смертей, но экономит деньги как потребителей, так и страховых компаний.
Анализ HLDI показал, что передние системы автоматического экстренного торможения могут снизить частоту исков о возмещении вреда здоровью почти на 25%. Аналогичное исследование Страхового института дорожной безопасности (IIHS), в котором участвовали аварии, о которых сообщила полиция, — обычно самый серьезный тип столкновения — обнаружило, что переднее автоматическое экстренное торможение снижает количество столкновений «спереди назад» на 50%. Эти аварии, которые часто называют ударами сзади другого транспортного средства, могут быть смертельными, особенно когда автомобиль, ответственный за столкновение, движется с высокой скоростью.
Эти аварии, которые часто называют ударами сзади другого транспортного средства, могут быть смертельными, особенно когда автомобиль, ответственный за столкновение, движется с высокой скоростью.
В то же время задний AEB снижает количество претензий по ДТП на 3% и исков по материальному ущербу на 14%.
Технология автоматического экстренного торможенияТехнология, используемая в автоматических передних и задних автоматических тормозных системах, аналогична. Обе системы включают камеры или другие датчики для обнаружения потенциального столкновения. Обычно системы сначала выдают звуковое или тактильное предупреждение. Если на это не обращают внимания, они автоматически применяют резкое торможение, чтобы избежать или, по крайней мере, уменьшить серьезность аварии.IIHS настолько убежден в ценности передних систем AEB, что сделал предотвращение фронтального столкновения критерием для получения наград Top Safety Pick и Top Safety Pick +.
Ежегодное исследование эффективности технологий предотвращения столкновений, проводимое HLDI, включает новые данные о страховании автомобилей Subaru 2015-18 модельного года с задним автоматическим экстренным торможением и без него. В сочетании с более ранним анализом автомобилей General Motors 2014-2015 годов, HLDI обнаружил, что автомобили, оснащенные задней AEB, имеют на 28% меньше претензий по материальному ущербу и на 10% меньше претензий при столкновении.Эти данные указывают на то, что система не просто защищает автомобиль застрахованного автомобилиста, но также защищает все, что в противном случае могло бы произойти.
«Мы не наблюдали такого снижения количества исков о повреждении транспортных средств и другого имущества от какой-либо другой передовой системы помощи водителю», — сказал старший вице-президент HLDI Мэтт Мур в онлайн-отчете об исследовании.
Заднее торможение экономит деньгиАвтоматическое экстренное торможение сзади не может спасти много жизней.Но аварии при движении задним ходом на малой скорости составляют значительную часть страховых случаев. Анализ HLDI показал, что иски о столкновении с повреждением задней части автомобиля на сумму менее 2000 долларов привели к ущербу более 8 миллиардов долларов в течение 8-летнего периода, начиная с 2010 года. Это составляет 17% от всех требований о столкновении.
Две другие технологии, предназначенные для предотвращения столкновений с задним ходом — датчики парковки и системы задней камеры — не так эффективны, согласно анализу HLDI. Было обнаружено, что системы задней камеры снизили количество исков о материальном ущербе на 5% и немного увеличили количество исков о столкновении.Датчики парковки также снизили частоту претензий по материальному ущербу на 5% и уменьшили количество претензий при столкновении на 1%.
Задние автоматические системы экстренного торможения кажутся превосходным решением, но существующие системы могут быть проблематичными при попытке вернуться на улицу с крутого подъездного пути или через дорогу с крутой вершиной. В таких ситуациях они могут автоматически применять резкое торможение, когда в этом нет необходимости и это совершенно неожиданно.
Автопроизводители могут предоставить решение этой проблемы, включив выключатель, который деактивирует систему для одноразового использования.С помощью этого решения водители могут отключать технологию при маневрировании в местах, которые могут вызвать случайное включение тормозов, например, при выезде задним ходом с проезжей части при выходе из дома.
Институт данных о потерях на дорогах (HLDI) является основным источником информации для этой статьи. Это было верно на 7 января 2020 года, но с тех пор оно могло измениться.
Модель автоматического экстренного торможения с учетом распознавания водителем намерения переднего транспортного средства
Намерение водителя переднего транспортного средства играет важную роль в системе автоматического экстренного торможения (AEB).Если переднее транспортное средство резко затормозит, существует потенциальный риск столкновения со следующим автомобилем. Поэтому мы предлагаем модель распознавания намерений водителя для переднего транспортного средства, которая основана на нейронной сети обратного распространения (BP) и скрытой марковской модели (HMM). Данные о педали тормоза, педали акселератора и скорости транспортного средства используются в качестве входных данных предлагаемой модели BP-HMM для распознавания намерения водителя, которое включает равномерное вождение, нормальное торможение и экстренное торможение. Согласно признанному намерению водителя, передаваемому через Интернет транспортных средств, предлагается модель AEB для следующего транспортного средства, которая может динамически изменять критический тормозной путь в различных условиях движения, чтобы избежать наезда сзади.Чтобы проверить производительность предложенных моделей, мы провели тесты на распознавание намерений водителя и моделирование AEB в среде совместного моделирования Simulink и PreScan. Результаты моделирования показывают, что средняя точность распознавания предложенной модели BP-HMM составила 98%, что было лучше, чем у моделей BP и HMM. В тестах «От автомобиля к автомобилю сзади» (CCRm) и «От автомобиля к автомобилю сзади» (CCRb) минимальное относительное расстояние между следующим транспортным средством и передним транспортным средством находилось в диапазоне 1.5–2,7 м и 2,63–5,28 м соответственно. Предлагаемая модель AEB имеет лучшие характеристики предотвращения столкновений, чем традиционная модель AEB, и может адаптироваться к индивидуальным водителям.
1. Введение
Наезды сзади являются наиболее распространенными дорожно-транспортными происшествиями, более 90% которых вызваны невнимательностью или нервозностью водителей [1]. Национальный совет по безопасности на транспорте (NTSB) указывает, что 80% наездов сзади можно избежать, используя передовые системы предотвращения столкновений [2].
Автоматическая система экстренного торможения (AEB) — это типичная усовершенствованная система предотвращения столкновений, в которой используются бортовые датчики для определения риска столкновения и при необходимости происходит автоматическое торможение во избежание столкновения. Согласно отчету об исследовании [3], когда скорость транспортного средства менее 50 км / ч, транспортные средства, использующие систему AEB, могут снизить количество аварий сзади на 38%. Поэтому изучение системы AEB имеет большое значение.
Это ключ к системе AEB для оценки степени опасности и создания модели предотвращения столкновений.Во многих исследованиях для измерения риска используется безопасный тормозной путь [4–6] или время до столкновения (TTC) [7–9]. На основе этих моделей также есть много улучшений. Катаре и Эль-Шаркави [10] предложили модель предупреждения о столкновениях с использованием нейронной сети, основанной на контролируемом обучении, чтобы обеспечить раннее предупреждение о возможных столкновениях. Chen et al. [11] предложили новый алгоритм, учитывающий как время столкновения, так и безопасный тормозной путь. Kaempchen et al. В [12] предложен метод расчета времени срабатывания АЕБ при экстренном торможении, учитывающий все возможные траектории и размеры цели и машины-носителя.Pei et al. [13] предложили концепцию запаса по времени предотвращения столкновения на основе известной информации о движении мастерской, и был разработан иерархический алгоритм предупреждения / предупреждения столкновения, применимый к характеристикам предотвращения столкновения различных водителей. Кроме того, многие ученые также рассматривают влияние состояния дорожного покрытия на характеристики AEB. Han et al. [14] предложил стратегию торможения AEB, которая учитывала влияние различного трения на дороге на порог торможения TTC. Kim et al. [15] предложил алгоритм оценки максимального коэффициента трения шины о дорогу на основе взаимодействия нескольких моделей и применил его к системе AEB.Hwang и Choi [16] использовали торможение с ранним предупреждением для оценки максимального коэффициента трения шины в реальном времени, чтобы получить состояние сцепления с дорогой и спрогнозировать риск столкновения сзади, адаптивно на основе информации о трении. Kim et al. [17] предложил алгоритм управления AEB, который может компенсировать влияние уклона и трения дороги. Большинство параметров описанной выше модели исследования не могут быть скорректированы в режиме онлайн и не могут хорошо адаптироваться к поведению водителя в различных условиях движения.
В последнее время для повышения надежности системы исследованиям поведения водителей уделяется больше внимания. Ли и др. [18] изучали поведение китайских водителей при визуальном сканировании на сигнальных и несигнальных перекрестках. Другое их исследование [19] показало, что заторы на дорогах негативно влияют на поведение водителя на дороге после заторов, что служит ориентиром для разработки последующих систем помощи. Что касается модели антиколлизии, многие исследования начинают рассматривать адаптивную модель характеристик водителя.Xiong et al. [20] разработали онлайн-алгоритм классификации уровня риска, основанный на нескольких индексах безопасности, таких как TTC, временной интервал и относительное расстояние при экстренном торможении. Дуан и др. [21] извлекли три основных сценария конфликта между автомобилем и велосипедом из натуралистических данных о вождении, проанализировали влияние типов конфликтов на поведение китайских водителей при торможении и предложили метод разработки адаптивного Bicyclist-AEB, основанный на характеристиках торможения водителя. Wada et al. [22] описали режим замедления торможения профессиональных водителей в последнюю секунду с предполагаемым индексом риска и применили его к системе AEB.Wang et al. [23] предложили алгоритм предупреждения о прямом столкновении, который может регулировать порог предупреждения в реальном времени в соответствии с изменением поведения водителя. Белла и Руссо [24] проанализировали поведение водителя, определили эффективную систему помощи водителю, которая может быть легко принята водителем, а затем предложили новый алгоритм предупреждения о столкновении, основанный на восприятии риска водителем. Ли и др. [25] использовали алгоритм обучения искусственной нейронной сети для создания модели поведения водителя.Риск столкновения определялся в соответствии с ходовыми качествами водителя. Wang et al. [26] использовали симулятор вождения для имитации событий, связанных только с торможением, а не столкновений, а затем использовали поведение водителя при торможении, чтобы имитировать ожидаемую реакцию водителя на замедление. Также существует множество исследований, в которых учитывается поведение или намерения других транспортных средств при вождении. Юань и др. [27] предложили метод прогнозирования маневра при смене полосы движения транспортных средств впереди с использованием скрытой марковской модели.Geng et al. [28] использовали HMM для изучения непрерывных характеристик поведения при вождении и предсказали поведение целевого транспортного средства, комбинируя апостериорную вероятность и априорную вероятность. Hu et al. [29] использовали семантику для определения поведения транспортного средства и вероятностную структуру, основанную на глубоких нейронных сетях, для оценки намерения водителя, конечного положения и соответствующей информации о времени окружающих транспортных средств. Jo et al. [30] предложили единый алгоритм отслеживания и обоснования поведения транспортных средств, который может одновременно оценивать динамику окружающих транспортных средств и намерения водителей.В этих исследованиях в основном используются датчики для получения состояния, которое демонстрирует транспортное средство, они основываются на данных или моделях, чтобы адаптироваться к поведению водителя, и в меньшей степени учитывают поведение водителей окружающих транспортных средств и их меняющиеся тенденции, хотя это может быть как важны также характеристики водителя.
С быстрым развитием коммуникационных технологий, применение технологии Интернета транспортных средств может упростить передачу данных между транспортными средствами [31–33].Wu et al. [34] предложили метод прогнозирования риска столкновения транспортного средства на основе Интернета транспортных средств, который может прогнозировать риск столкновения транспортного средства путем всестороннего учета движения / положения целевого транспортного средства, поведения водителя и дорожной информации. Thomas et al. [35] предложили систему предотвращения столкновений с использованием фильтра Калмана и специальной связи ближнего действия (DSRC) для пересечения прямых и кривых дорог. Лю и др. [36] предложили основанную на DSRC систему раннего предупреждения конфликтов в очереди, которая учитывала не только проницаемость DSRC, но и факторы влияния трафика и связи.Тиан и др. [37] предложили метод использования DSRC для прогнозирования поведения транспортного средства в среде совместного транспортного средства. Вышеупомянутое исследование в основном применяется к системе раннего предупреждения и рассматривает только поведение переднего транспортного средства без учета времени, затрачиваемого на поведение водителя, прежде чем поведение транспортного средства изменится, что может привести к задержке прогнозирования. Однако вместо этого эти исследования предоставляют новые идеи для дизайна AEB.
В этой статье мы предложили модель AEB, основанную на распознавании намерений водителя переднего транспортного средства.Модель распознает намерение движения переднего транспортного средства и передает информацию следующему транспортному средству с помощью технологии связи между автомобилями. По сравнению с предыдущими исследованиями, этот документ динамически добавляет намерение водителя переднего транспортного средства в систему AEB следующего транспортного средства посредством связи между транспортными средствами, чтобы улучшить характеристики системы предотвращения столкновений. Основным вкладом в этот документ является следующее: (1) предлагается метод распознавания намерения вождения в реальном времени с двухуровневой структурой; (2) модель AEB предлагается на основе безопасного расстояния и намерения вождения переднего транспортного средства; (3) намерение вождения предшествующего транспортного средства динамически комбинируется с системой AEB следующего транспортного средства.
Остальная часть документа организована следующим образом: Раздел 2 содержит подробную методологию предлагаемого метода. В разделе 3 представлен имитационный эксперимент. В разделе 4 представлены экспериментальные результаты. Раздел 5 посвящен обсуждениям. Раздел 6 суммирует выводы.
2. Методы
Была предложена модель AEB, основанная на распознавании намерения водителя переднего транспортного средства через Интернет транспортных средств. Эта модель в основном состояла из двух частей: модели распознавания намерений водителя переднего автомобиля и модели AEB следующего автомобиля.На рисунке 1 представлена принципиальная схема работы системы. Во-первых, мы создали модель распознавания намерений водителя на основе BP-HMM для распознавания единообразного намерения вождения, нормального намерения при торможении и экстренного торможения водителя переднего транспортного средства по собранным данным о педали тормоза, педали акселератора и скорости передний автомобиль. Во-вторых, распознанное намерение водителя и другие параметры движения переднего транспортного средства передавались следующему транспортному средству через Интернет транспортных средств.Наконец, в соответствии с полученным намерением водителя, в предлагаемой модели AEB следующего транспортного средства был изменен метод расчета критического тормозного пути и скорректирована логика торможения AEB в реальном времени.
2.1. Модель распознавания намерений водителя переднего транспортного средства
Намерение водителя может быть отражено несколькими действиями водителя, происходящими одновременно или непрерывно в течение определенного периода. Рассматривая взаимосвязь между поведением и намерениями водителя, а также временными характеристиками поведения водителя, мы сначала распознали поведение водителя, а затем сделали вывод о намерении водителя по поведению распознанного водителя.
Модели BP и HMM — это два типа моделей, которые обычно используются для распознавания поведения и намерений водителя. Модель БП имеет простую структуру и высокую отказоустойчивость, но для ее обучения требуется большое количество образцов. Модель HMM обладает сильной способностью к временному моделированию, что требует дополнительной поддержки предварительных знаний во время обучения и подходит для небольших выборок. Поэтому мы предложили модель распознавания намерений водителя, основанную на BP и HMM, которая полностью использует классификационную способность нейронной сети BP для больших данных и способность HMM отображать временные отношения малых данных [38].
Наезды сзади в основном происходят, когда скорость переднего транспортного средства ниже, чем у следующего автомобиля, или когда переднее транспортное средство тормозит. Поэтому предлагаемая модель BP-HMM в основном ориентирована на распознавание намерения водителя при постоянной скорости, нормальном торможении и экстренном торможении.
На рисунке 2 показана структура предлагаемой модели BP-HMM. Смещение педали и скорость педали тормоза и педали акселератора использовались в качестве входных данных модели BP для распознавания поведения водителя переднего транспортного средства.Мы разделили типичное поведение водителя при торможении на шесть категорий: легкое нажатие на педаль тормоза, нормальное нажатие на педаль тормоза, быстрое нажатие педали тормоза, удержание педали тормоза в нужном положении, отпускание педали тормоза и отсутствие действия педали тормоза. Точно так же поведение водителя при ускорении также было разделено на шесть категорий: обычное нажатие педали акселератора, быстрое нажатие педали акселератора, удержание педали акселератора в нужном положении, нормальное отпускание педали акселератора, быстрое отпускание педали акселератора и отсутствие действий акселератора. педаль.Затем скорости транспортного средства были классифицированы в соответствии с диапазоном скоростей транспортного средства. Результаты распознавания поведения водителя и классифицированная скорость транспортного средства использовались в качестве входных данных модели HMM для распознавания намерений водителя относительно переднего транспортного средства. По замыслу водителя HMM подразделялись на единообразное вождение, нормальное торможение и экстренное торможение. После обработки модели HMM было распознано намерение текущего водителя.
Модель нейронной сети BP использовалась в качестве классификатора поведения драйвера, и ее процесс обучения классификации состоял из прямого и обратного распространения, как показано на рисунке 3.Трехуровневая нейронная сеть BP может выполнять отображение произвольных размеров, и сложность двух типов сетей BP, которые должны быть построены, одинакова, поэтому оба типа нейронных сетей BP используют единую сеть скрытого уровня. Структура состояла из одного входного слоя, одного скрытого слоя и одного выходного слоя. На рис. 3 -1 представляют количество скрытых слоев и количество нейронов во входном и выходном слоях соответственно [39].
В процессе прямого распространения данные педали передавались на входной уровень, обрабатывались слой за слоем через скрытый слой, а затем передавались на выходной уровень.Состояние нейронов в каждом слое влияет только на состояние нейронов следующего слоя, в то время как выходной слой, наконец, выводит результаты классификации поведения драйвера.
Во время обратного распространения, результат выходного уровня сравнивается со значением ожидаемой классификации поведения драйвера, и возвращается ошибка в соответствии с путем исходного сетевого подключения. Затем будут изменены вес и смещение между нейронами. Следовательно, ошибку можно постепенно уменьшать до тех пор, пока она не будет ограничена заранее определенным диапазоном.
Функция активации процесса передачи этой сети использует сигмовидную функцию, которая определяется как
С учетом требований времени обучения и точности обучения, алгоритм адаптивного градиентного спуска (AGD) был использован в качестве алгоритма обратного распространения ошибки сети. .
Данные, собранные с педали тормоза и педали акселератора, были приняты в качестве входных данных, а результаты классификации шести режимов торможения или ускорения были взяты в качестве выходных данных.А количество нейронов скрытого слоя рассчитывалось следующим образом: где — 20, а — 6; — любая константа от 1 до 10.
Затем, итеративное обучение было заменено другим, и было окончательно подтверждено, что количество нейронов в единственном скрытом слое двух типов нейронных сетей BP составляет 12 и 15 соответственно.
Скорость была разделена на десять уровней. Первые девять уровней соответствуют скоростям 0–10 км / ч, 10–20 км / ч,…, 80–90 км / ч, а если скорость больше 90 км / ч, это последний уровень.
Распознанное поведение водителя и классифицированная скорость транспортного средства использовались в качестве входных данных модели HMM для распознавания намерения водителя переднего транспортного средства, что может быть определено как [40] где,, и представляют результаты классификации поведения при торможении и ускорении. и скорости автомобиля соответственно.
Тогда намерение водителя HMM можно выразить следующим образом: где мы использовали для обозначения трех намерений водителя; тогда — матрица перехода намерений водителя от к., и, соответственно, представляют собой матрицу недоразумений трех намерений водителя в отношении каждого режима торможения, режима ускорения и классификации скорости. обозначает начальный вектор вероятности намерений водителя.
Поскольку входные данные модели HMM являются трехмерными, итерационная формула прямых и обратных переменных в алгоритме Баума – Велча должна быть изменена следующим образом:
Формула переоценки алгоритма Баума – Велча с несколькими Матрицы вероятности наблюдения были изменены на то, что прямая переменная обозначает вероятность, когда частичная последовательность наблюдения есть, а намерение водителя соответствует времени.Обратная переменная обозначает вероятность того, что часть последовательности наблюдений находится в данный момент, а состояние представляет собой ожидание наблюдаемого значения в -м измерении последовательности наблюдений, когда таково намерение водителя. является константой, определяемой как 3.
Модифицированный алгоритм Баума-Велча использовался для обучения HMM намерения водителя, после чего можно было получить параметры HMM для движения с постоянной скоростью, нормального торможения и намерения экстренного торможения, соответственно.
2.2. Модель AEB следующего транспортного средства
Чтобы гарантировать, что следующее транспортное средство может избежать столкновения при различных намерениях водителя в переднем транспортном средстве, была создана модель AEB, основанная на трех расчетах критического тормозного пути. Кроме того, параметры движения и результаты распознавания намерений водителя, необходимые для расчета критического тормозного пути, были получены через Интернет транспортных средств.
Метод расчета критического тормозного пути предлагаемой модели AEB показан на рисунке 4.- критический тормозной путь модели AEB; — заранее определенное безопасное расстояние между двумя транспортными средствами, равное 3 м; — тормозной путь за весь процесс движения следующего транспортного средства; это тормозной путь для всего процесса переднего транспортного средства. расстояние, пройденное следующим транспортным средством при распознавании намерения переднего транспортного средства; расстояние, пройденное следующим транспортным средством за время задержки связи; — это расстояние, которое проезжает следующий автомобиль, когда педаль тормоза следующего автомобиля нажата до тех пор, пока не сработает торможение.- расстояние, пройденное при увеличении тормозного замедления следующего транспортного средства; — расстояние, проходимое следующим транспортным средством при торможении следующего транспортного средства с постоянным замедлением до той же скорости, что и переднее транспортное средство; — расстояние, пройденное передним транспортным средством, когда педаль тормоза следующего транспортного средства нажата до тех пор, пока тормоз не сработает; — расстояние, пройденное при увеличении тормозного замедления переднего транспортного средства; — расстояние, которое проходит переднее транспортное средство при торможении следующего транспортного средства при постоянном замедлении до той же скорости, что и переднее транспортное средство [41].
Критический тормозной путь модели AEB рассчитывался следующим образом: где — скорость переднего транспортного средства; — скорость следующего транспортного средства; одинаковая скорость двух транспортных средств в наиболее опасный момент; замедление следующего транспортного средства; — замедление переднего транспортного средства; время, необходимое для распознавания намерения водителя передвигаться впереди транспортного средства, определяемого как; это задержка передачи Интернета транспортных средств, и поскольку обычно используемые устройства Интернета транспортных средств на основе протокола DSRC обычно имеют задержку в несколько миллисекунд, в то время как сеть 5G, одно из будущих направлений развития Интернета транспортных средств, имеет незначительную задержку одной миллисекунды, поэтому задержка связи транспортных средств в тесте моделирования в этом документе установлена на 0; — это время, когда педаль тормоза следующего транспортного средства нажимается до тех пор, пока не вступит в силу торможение, определяемое как 0.15 с; и — время увеличения замедления тормоза транспортного средства, определяемое как 0,45 с.
В соответствии с намерением водителя переднего транспортного средства и условиями движения двух транспортных средств, параметры и в уравнениях (8) и (9) были изменены следующим образом: (i) Если два транспортных средства двигались с постоянной скорость и следующее транспортное средство было быстрее, чем переднее транспортное средство, время столкновения возникает, когда два транспортных средства замедляются до той же скорости, что и переднее транспортное средство, но следующее транспортное средство все еще движется быстрее, чем переднее транспортное средство.Затем параметры и были рассчитаны следующим образом: где — максимальное замедление следующего транспортного средства, определяемое как 8 м / с 2 [42]. (Ii) Если намерение водителя переднего транспортного средства было обычным торможением и, время столкновения происходит, когда два автомобиля замедляются до одинаковой скорости, но следующее транспортное средство все еще движется быстрее, чем переднее транспортное средство. Предположим, что та же самая скорость транспортного средства, которая определяется как Then, параметры и были рассчитаны следующим образом: Если, время столкновения происходит, когда оба транспортных средства замедляются до остановки, то есть, и расстояние, пройденное следующим транспортным средством, равно больше, чем у переднего автомобиля.Затем параметры и были рассчитаны следующим образом: (iii) Если намерением водителя переднего транспортного средства было экстренное торможение и, время столкновения наступает, когда два транспортных средства замедляются до одинаковой скорости, но следующее транспортное средство все еще движется быстрее, чем переднего транспортного средства, а затем также принимается одинаковая скорость двух транспортных средств как, которая определяется как где — максимальное замедление переднего транспортного средства, определяемое как 6 м / с 2 .
Затем параметры и были рассчитаны следующим образом:
Если, время столкновения происходит, когда оба автомобиля замедляются до остановки, и расстояние, пройденное следующим транспортным средством, больше, чем расстояние переднего транспортного средства.
Затем параметры и были рассчитаны следующим образом:
Таким образом, если относительное расстояние между двумя транспортными средствами меньше или равно, предлагаемая модель AEB следующего транспортного средства будет обеспечивать автоматическое торможение.
3. Эксперимент с имитацией
Для проверки точности распознавания намерения водителя относительно переднего транспортного средства и эффективности предложенной модели AEB были проведены имитационное испытание намерения водителя переднего транспортного средства и испытание имитационного моделирования характеристик модели AEB, соответственно.
Как показано на рисунке 5, в среде совместного моделирования Simulink и PreScan были проведены два имитационных теста, а предложенная модель BP-HMM и модель AEB были созданы в Simulink. На рисунке 6 показан сценарий моделирования. На рисунке 6 (а) показан сбор данных для обучения и сценарий тестирования предлагаемой модели BP-HMM для передней машины. На рисунке 6 (b) показан сценарий тестирования производительности традиционной модели AEB. На рисунке 6 (c) показан предлагаемый сценарий тестирования производительности AEB.
Построена трехполосная дорога с односторонним движением, протяженностью 1 км и шириной 3.5 м для каждой полосы в PreScan. Затем в динамических моделях автомобилей использовался 2D Simple. Следующей моделью был BMW X5, а передним — BMW Z3. Основные параметры моделей приведены в таблице 1. Водители-испытатели использовали симулятор G29 для управления транспортным средством (рисунки 5 и 6) в реальном времени. Два датчика TIS в следующем автомобиле использовались для определения относительного расстояния между двумя автомобилями. Модуль «Интернет транспортных средств» использовал датчик V2X, включая приемник и передатчик, который в основном использовался для отправки результатов распознавания намерений водителя и других данных о движении переднего транспортного средства в модуль AEB следующего транспортного средства (рис. 5).
| ||||||||||||||||||||||||||||||||||||
3.1. Сбор данных для модели намерения водителя
В тесте имитации намерения водителя в качестве тестеров были наняты пять опытных водителей мужского пола и пять опытных женщин. Каждый водитель использовал симулятор G29, чтобы управлять автомобилем и двигаться по прямой (рис. 6 (а)). В соответствии с индивидуальными привычками вождения водитель смоделировал равномерное вождение, нормальное торможение и экстренное торможение переднего транспортного средства в трех диапазонах скоростей 0–30, 30–60 и 60–90 км / ч и повторил тест 20 раз. в каждом состоянии.Затем было собрано 1800 групп данных, включая смещение педали тормоза, скорость педали тормоза, смещение педали акселератора, скорость педали акселератора и скорость автомобиля. Каждый водитель знал свое намерение во время операции и может сопоставить его с данными после теста, поэтому каждая группа данных может отражать намерение конкретного водителя. Мы берем каждую группу данных в качестве выборки, и эти 1800 выборок могут составить набор данных предлагаемой модели BP-HMM. Затем мы разделили 1200 выборок набора данных на обучающий набор, а оставшиеся 600 образцов — на тестовый.В обучающем наборе и тестовом наборе данные, относящиеся к трём различным намерениям водителя, составляли по одной трети каждое. Наконец, обучающий набор использовался для обучения параметров модели BP поведения каждого водителя и параметров HMM намерения каждого водителя, а набор тестов был использован для проверки точности распознавания предложенной модели BP-HMM.
3.2. Имитационный тест для AEB
Чтобы проверить эффективность предложенной модели AEB, мы выбрали четыре традиционные модели AEB в качестве объектов сравнения, а именно три из которых были основаны на безопасном расстоянии, а именно Mazda [4], Honda [5], и модели Беркли [6], а другой была модель TTC [8], основанная на столкновении во времени.
Условия испытаний в основном относятся к двум типам CCRb (торможение от автомобиля к автомобилю) и CCRm (перемещение автомобиля назад сзади) для тестирования AEB в Европейских правилах оценки новых автомобилей (Euro-NCAP) [43]. Поскольку все транспортные средства, участвовавшие в исследовании, были движущимися транспортными средствами, CCR (от автомобиля к заднему неподвижному автомобилю) не были включены в условия испытаний.
В соответствии со стандартом испытаний Euro-NCAP мы соответствующим образом изменили условия испытаний. Сценарии тестирования показаны на рисунках 6 (b) и 6 (c).В таблице 2 перечислены условия испытаний для сравнения моделей AEB. Мы сократили интервал скорости 10 км / ч, указанный в CCRm, до 5 км / ч и увеличили максимальную испытательную скорость следующего автомобиля до 90 км / ч, что увеличило плотность скорости теста. Затем в тесте CCRb педаль тормоза симулятора G29 использовалась для замедления. В процессе торможения водитель-испытатель разъяснил намерение торможения и провел операцию торможения в сочетании с личными привычками вождения. Наконец, плотность скорости тестового транспортного средства также была увеличена соответствующим образом.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
UDI: единообразное намерение вождения; NBI: нормальное намерение торможения; EBI: намерение экстренного торможения. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
В ходе теста 10 опытных водителей тестировались один раз для каждого условия вождения, и результаты 10 тестов в одинаковых условиях вождения обрабатывались как группа. Когда в одной и той же группе результатов было и столкновение, и успешное предотвращение столкновений, окончательный результат рассчитывался на основе среднего значения 10 тестов. Результаты других групп были усреднены для скорости столкновения или кратчайшего относительного расстояния.
4. Результаты
4.1. Результаты распознавания намерений водителя передним транспортным средством
В таблице 3 приведено сравнение точности распознавания различных моделей распознавания намерений водителя. Однослойная модель БП имеет низкую точность распознавания обычного намерения при торможении (91,0%) и среднюю скорость распознавания намерения водителя (96,0%). Однослойная модель HMM имеет самую низкую точность распознавания для равномерного намерения вождения и обычного намерения при торможении (76,5% и 81,0% соответственно), в то время как средняя скорость распознавания намерения водителя составляет всего 85.17%. Уровень точности модели BP-HMM превышает 97,0% для всех трех типов намерений водителя, 100% для единообразных намерений вождения, а средний уровень распознавания составляет 98%.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
4.2. Результаты моделирования AEB
На рис. 7 показано распределение замедления при торможении для 10 водителей при различных намерениях торможения в тесте модели AEB. На рис. 7 (а) показаны результаты распределения замедления при торможении пяти моделей AEB при обычном намерении водителя при торможении. На рисунке 7 (b) показаны результаты распределения замедления при торможении для пяти моделей AEB при намерении водителя при экстренном торможении.Как видно из рисунка 7, когда намерение водителя тормозить было нормальным, максимальное ускорение переднего транспортного средства было в основном сосредоточено между -1,5 и -3,0 м / с 2 . Когда водитель имел экстренное намерение торможения, максимальное замедление переднего транспортного средства было в основном сконцентрировано в диапазоне от –5,0 до –6,0 м / с 2 .
На рисунках 8 и 9, соответственно, показана сравнительная диаграмма наименьшего относительного расстояния между двумя автомобилями в тестах CCRm и CCRb пяти моделей AEB.Как показано на Рисунке 8, в тесте CCRm модели Mazda по мере увеличения скорости автомобиля кратчайшее относительное расстояние между двумя автомобилями также увеличивалось, с диапазоном от 4,48 м до 17,61 м. Характеристики моделей Honda и Berkeley были схожими, а дальность полета составляла в основном от 4 до 10 метров. Хотя модели TTC удалось избежать столкновения в диапазоне скоростей 30–65 км / ч, она не смогла избежать столкновения сзади в диапазоне 70–90 км / ч. Для предложенной модели AEB значение было стабильным между 1.5 м и 2,7 м.
Как показано на рисунке 9 (a), модели Honda, Berkeley и TTC не смогли избежать столкновения в диапазоне скоростей 60–90 км / ч, когда два автомобиля тянулись на расстоянии 40 м и водитель впереди идущего автомобиля делал аварийную остановку. Однако Mazda и предложенные модели AEB смогли успешно избежать столкновений на всех диапазонах скоростей теста. Как показано на Рисунке 9 (b), когда условия испытаний были изменены на переднее транспортное средство с нормальным намерением торможения, только модель TTC имела столкновение в диапазоне скоростей 80–90 км / ч.Когда расстояние между двумя автомобилями составляло 12 м, а переднее транспортное средство находилось на экстренном торможении, как показано на Рисунке 9 (c), модель Mazda и предлагаемая модель AEB все же успешно избежали столкновения. Кроме того, когда водитель переднего транспортного средства хотел перейти с экстренного торможения на нормальное, как показано на рисунке 9 (d), все пять моделей AEB избегали столкновений. Стоит отметить, что предложенная модель AEB была стабильной между 2,63 м и 5,28 м во время теста CCRb.
На рисунке 10 показано сравнение количества успешных конфликтов, которых удалось избежать каждой моделью в сценарии тестирования CCRb.Когда столкновение произошло во время испытания, начальные скорости обоих автомобилей были относительно высокими, от 60 до 90 км / ч. Модель Mazda и предложенная модель AEB избегали столкновений во всех диапазонах скоростей в условиях испытаний, а модель TTC имела наименьшее количество успешных попыток предотвращения столкновений среди пяти моделей.
В тесте CCRb распределение скорости транспортного средства в случае столкновения моделей TTC, Berkeley и Honda показано на рисунке 11. Все три модели столкнулись, когда начальная скорость транспортного средства была выше 60 км / ч, а водитель имел намерение экстренного торможения (EBI).Стоит отметить, что модели TTC не удалось избежать столкновения, когда начальная скорость была выше 80 км / ч, расстояние между транспортными средствами составляло 40 м, а водитель имел нормальное намерение торможения (NBI).
5. Обсуждение
Из таблицы 2 видно, что однослойная модель HMM оказала наихудшее влияние на распознавание единообразного намерения вождения и нормального намерения торможения. Хотя модель HMM обладала сильной способностью отображать данные с временной зависимостью, она не подходила для классификации больших объемов данных.Из-за большого размера и длины входных данных одной выборки и большого количества одновременно обучаемых выборок эффект классификации был не очень хорошим. Однослойная нейронная сеть БП может использоваться для классификации больших объемов данных. Хотя общий эффект распознавания при распознавании намерения был хорошим, было легко ошибочно идентифицировать обычное намерение торможения как два других намерения. Однако модель BP-HMM имела лучший эффект распознавания с точностью 100% для единообразного намерения вождения и средней степенью распознавания 98% для каждого намерения.Результаты распознавания показывают, что комбинация нейронной сети BP и HMM может повысить точность классификации больших объемов данных.
Во время пяти испытаний модели AEB (рис. 6), хотя один и тот же водитель или разные водители каждый раз выполняли разные операции, когда у водителей было одинаковое намерение торможения, тенденция распределения замедления при торможении для переднего транспортного средства была в основном одинаковой. Следовательно, при одинаковых условиях торможения можно не учитывать влияние водителей в разное время на результаты испытаний разных моделей.
Хотя модель Mazda смогла избежать столкновения в тестах CCRm и CCRb (рисунки 7 и 8), стратегия торможения была слишком консервативной, особенно на высоких скоростях, и легко могла вызвать ненужные помехи водителю. Стратегии торможения моделей Honda и Berkeley были более агрессивными, чем у модели Mazda, и производительность этих двух моделей в тестах CCRm была аналогичной. В тесте CCRb две модели показали лучшие результаты, когда намерением водителя было нормальное торможение передним автомобилем.Однако в случае высокоскоростного вождения и экстренного торможения переднего транспортного средства столкновение невозможно успешно избежать, и стратегия торможения более склонна к безопасности движения на низкой скорости. В этих пяти моделях производительность модели TTC была относительно низкой; также в тестах CCRm произошла коллизия. Хотя предотвращение столкновений может быть достигнуто путем регулировки порога торможения, это приведет к тому, что модель будет более консервативной на низкой скорости. Однако предлагаемая модель AEB может не только успешно избегать столкновений при любых условиях, но также сохранять кратчайшее относительное расстояние между двумя транспортными средствами около 3 м во время торможения.В отличие от модели Mazda, она не консервативна и позволяет избежать столкновений на высокой скорости, что улучшает характеристики предотвращения столкновений и приемлемость системы AEB.
Все модели хорошо работали на низких скоростях, и столкновения в основном происходили, когда следующий автомобиль двигался на высокой скорости, а передний автомобиль имел намерение притормаживать. Как показано на рисунках 9 и 10, в испытании CCRb столкновения произошли в модельных испытаниях Honda, Berkeley и TTC, когда скорость превышала 60 км / ч, особенно при экстренном торможении переднего транспортного средства.Поскольку модели AEB требуется период времени для обнаружения рисков, в течение этого периода с увеличением начальной испытательной скорости или увеличением тормозной силы переднего транспортного средства расстояние между двумя транспортными средствами относительно уменьшится, что приведет к увеличению риска. столкновения. Модель TTC представила опасные ситуации при нормальном торможении переднего транспортного средства, которые не могут хорошо отражать риск столкновения, когда транспортное средство внезапно тормозит (особенно на небольшом относительном расстоянии). Однако, когда относительная скорость между двумя транспортными средствами была высокой, характеристики предотвращения столкновений TTC будут затронуты.Хотя вышеуказанная модель не смогла избежать столкновения при некоторых условиях движения, она все же снизила скорость столкновения и потери, вызванные столкновением.
Таким образом, параметры традиционной модели представляют собой фиксированные значения, и возможность регулировки в соответствии с намерением вождения или изменением состояния переднего транспортного средства недостаточна, что применимо только к некоторым условиям движения. Однако предлагаемая модель может регулировать стратегию торможения в соответствии с намерением вождения переднего транспортного средства с большей адаптивной способностью.
6. Заключение
В этой статье мы предложили модель AEB, основанную на распознавании намерения водителя переднего транспортного средства через Интернет транспортных средств. Модель BP-HMM была предложена для распознавания намерения водителя переднего транспортного средства. Распознанное намерение водителя было передано через Интернет транспортных средств; затем была предложена модель AEB для следующего транспортного средства для расчета критического тормозного пути в различных условиях движения во избежание наезда сзади. В тесте имитации распознавания намерений водителя предложенная модель BP-HMM показала лучший результат при распознавании намерений водителя, чем предыдущие однослойные модели BP и однослойные модели HMM.Результаты моделирования AEB показали, что по сравнению с традиционной моделью AEB, предложенная модель AEB обеспечивает более эффективное торможение, чтобы избежать столкновения сзади в различных условиях испытаний, и делает систему AEB более безопасной и комфортной, не вызывая торможение слишком рано или слишком поздно.