Подобрать ДХО контроллер — DEVAYSER.COM
Чтобы выбрать нужный контроллер, воспользуйтесь таблицей ниже.
| Вид включения ламп | Управление по «+» | Управление по «-« | ||
|---|---|---|---|---|
| однокан. (1+) | двухкан. (2+) | однокан. (1-) | двухкан. (2-) | |
| *Схема включения | ||||
| Требуемый контроллер | Lite DRL DRL controller | Max DRL 2- controller | ||
| DRL 2+ controller Max DRL 2+ controller START-STOP 3-in-1 (DRL) | ||||
*Точка подключения выходов ДХО-контроллеров на схемах показана в виде крестиков.
Также, можете прислать схему подключения фар на наш e-mail: [email protected]. Мы определим нужный тип ДХО контроллера и нанесем на схему точки подключения.
Если схема недоступна, определить нужный тип контроллера можно используя следующий алгоритм:
- В автомобиле ищем точку подключения выхода контроллера. Это провод, который идет к лампочке в фаре. Подключаем к этому проводу тестер (можно снять крышку фары и подключиться к контакту лампы). По показаниям вольтметра определяем какая полярность включает фары авто.
- вЫключаем фары и подаем в точку подключения тестера напряжение той полярности, которое включает фары (см. пункт 1). Таким образом вы имитируете работу контроллера на максимальной яркости. Если загорится одна фара — нужен контроллер с двумя выходами.
В п.1 определяется полярность выхода контроллера, в п.2 — одноканальный или двухканальный.
При самостоятельном определении нужного контроллера, будьте внимательны — возможны схемы с комбинированным управлением ламп.
Вот два «экзотических» варианта подключения, которые вводят в ступор даже опытных электриков:
Варианты комбинированного включения ламп и подключение ДХО контроллеров в таких случаях- В этом варианте включения, несмотря на то, что дальний свет включается «минусом», дополнительно разрывается плюсовое питание с помощью реле. Чтобы работа ДХО-контроллера не зависела от положений переключателя света, используйте плюсовой контроллер и дополнительное реле. [Дополнительное реле подает постоянный «минус» на лампу дальнего света через НЗ контакты (в случае если переключатель света оставлен в положении «ближний свет»). При включении габаритов, ДХО-контроллер прекращает работу; также, срабатывает дополнительное реле и восстанавливает разорванную цепь в первоначальное (штатное) состояние.]
- Характерная особенность такого включения — при включении дальнего света фар, ближний свет продолжает гореть.
Преимущества предложенных вариантов подключения ДХО-контроллеров в том,
что в обоих случаях все необходимые подключения, связанные с наличием дополнительного реле,
производятся непосредственно возле фары и тянуть лишние провода не нужно.
Не нашли интересующий Вас вопрос? Задайте его прямо на этой странице или напишите на e-mail: [email protected]
Автоматический контроллер ДХО
Контроллер предназначен для автоматического включения и отключения ламп дневных ходовых огней. Лампы могут быть как светодиодные, так и лампы накаливания, общей мощностью до 50 Вт.
Контроллер автоматически подает напряжение на лампы при запуске двигателя и отключает нагрузку при остановке двигателя. Также есть возможность подключить цепь ближнего света и стояночный тормоз для принудительного отключения ламп ДХО.
Блок контроллера выполнен в герметичном корпусе с пыле-влагозащитой IP67 (заливка теплопроводным силиконовым компаундом).
Заводская калибровка уровня включения ДХО: 13,5В; отключения: 13,0В.

Предохранитель в комплект не входит. Если штатный предохранитель в схеме автомобиля отсутствует, то для защиты выхода блока контроллера от короткого замыкания в лампах необходимо установить предохранитель. Ток выбрать, исходя из применяемых ламп ДХО. Для светодиодных ламп ток предохранителя 3-7А, для ламп накаливания 21Вт ток предохранителя 7-10А .При подключении к АКБ нужно применять провод с сечением от 1кв.мм для светодиодных ламп и от 1,5кв.мм для ламп накаливания. На коротких участках допускается применение сечения провода 1кв.мм. Важно, чтобы длина красного провода была минимальна (или сечение провода увеличить), сопротивление контактов предохранителя было также минимально. От этого зависят реальные уровни включения и отключения ДХО.
Схема подключения:
| Мощность нагрузки | 50 W |
| Разъемы | Без разъемов |
| Плавное включение | Резкое |
| Режим габарита | Гашение |
| Управление ДХО | Аналоговое |
| Напряжение | 10-16В |
| Длина | 20 mm |
| Ширина | 20 mm |
| Вес | 15 g |
| Гарантия | 2 года |
Categories: Другая электроника
Average customer rating:
(4)
5. 00 out of 5 stars
00 out of 5 stars
| 4 | ||
| 0 | ||
| 0 | ||
| 0 | ||
| 0 |
-
Автоматический контроллер ДХО
By Ульянов Владимир Петрович December 22, 2020 09:24Отправили быстро и пришло в срок указанный на сайте.
 С виду очень хорошо. Пока не проверял.
С виду очень хорошо. Пока не проверял. Автоматический контролер дхд
By Сазонов Сергей Витальевич October 15, 2020 10:08Хороший контроллер всем советую. Ещё аз Спасибо.
Контроллер дхо
By Пекач Александр Васильевич June 13, 2020 08:05Работает отлично, но я бы повысил напряжение выключения до 12,9 вольт.
А так огонь!!!Контролер дхо
By Сазонов Сергей Витальевич May 29, 2020 20:24 Все понравилось ещё не подключался.
 С виду очень хорошо. Пока не проверял.
С виду очень хорошо. Пока не проверял.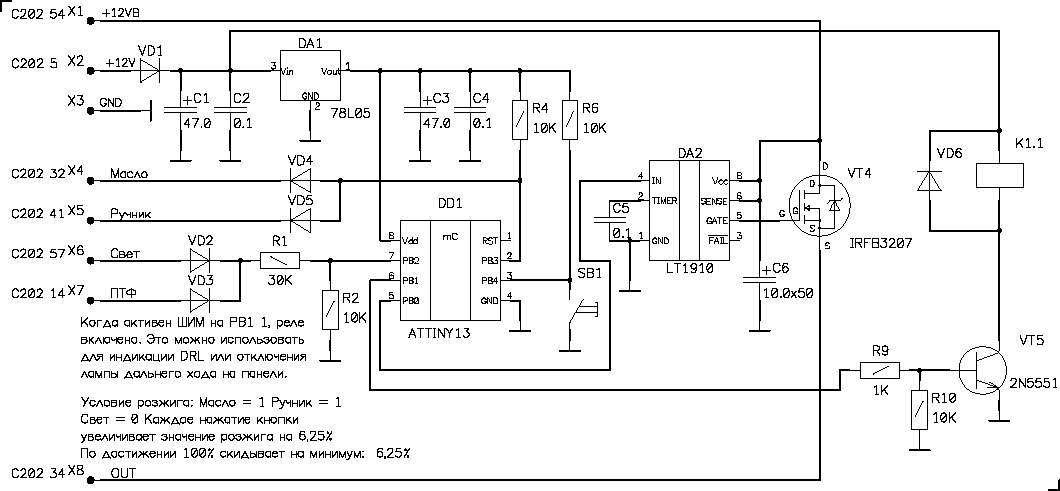 А так огонь!!!
А так огонь!!!Схема дистанционного управления квадрокоптером без MCU
Хотя схемы дистанционного управления квадрокоптером можно очень легко приобрести на рынке или в любом интернет-магазине, заядлый любитель электроники никогда не сможет узнать, как на самом деле они работают и можно ли их построить. дома?
В этой статье мы попытаемся построить простую схему дистанционного управления квадрокоптером, используя дискретные компоненты и используя радиочастотные модули дистанционного управления, и без привлечения сложных схем на основе MCU.
Пошаговое руководство на самом деле поможет заинтересованным любителям понять, как просто можно управлять квадрокоптером с помощью концепции ШИМ.
Мы уже изучили основы квадрокоптера, теперь давайте рассмотрим раздел дистанционного управления, который в конечном итоге поможет управлять устройством удаленно.
Необходимые базовые модули
Основные компоненты, которые могут потребоваться для проекта, приведены ниже:
В основном нам потребуются следующие 3 этапа схемы:
1) 4-канальные радиочастотные модули дистанционного управления Tx, Rx — 1 комплект
2) Схемы ШИМ-генератора на базе IC 555 — 4 шт.
3) Схемы контроллера двигателя BLDC — 4 шт. при предлагаемом дизайне, например, отсутствие джойстиков для управления, которые заменены потенциометрами или потенциометрами, тем не менее, работоспособность системы можно ожидать на уровне профессиональных устройств.
Ручной ШИМ-передатчик в основном будет состоять из удаленного модуля Tx, интегрированного с 4 дискретными цепями управления PWM, в то время как квадрокоптер должен быть заключен в 1 схему Rx, интегрированную с 4 дискретными схемами драйвера BLDC.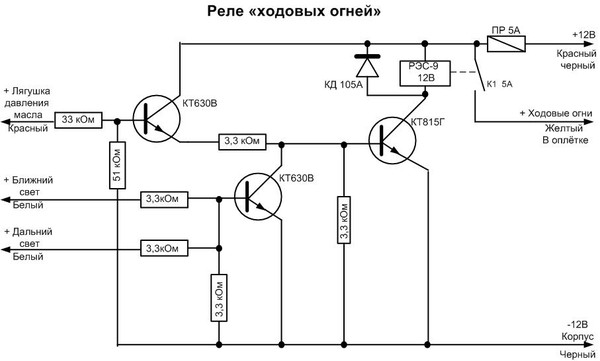
Давайте начнем со схем двигателя квадрокоптера и посмотрим, как контроллер двигателя BLDC должен быть настроен и подключен к цепи Rx.
В одном из предыдущих постов мы узнали, как можно построить универсальный контроллер двигателя BLDC с использованием одного чипа, однако эта конструкция не предназначена для управления относительно более тяжелыми двигателями квадрокоптера, поэтому она может не подойти для данного приложения.
К счастью, доступен вариант «старшего брата» для вышеуказанной схемы, который идеально подходит для управления двигателями квадрокоптера. Спасибо TEXAS INSTRUMENTS за то, что предоставили нам такие замечательные однокристальные специализированные схемные модули.
Чтобы узнать больше об этой высокоточной ИС драйвера BLDC, вы можете обратиться к следующему техническому описанию в формате pdf того же
https://www.homemade-circuits.com/wp-content/uploads/2015/10/slwu083a. pdf
На приведенной ниже схеме показана полная схема контроллера драйвера двигателя квадрокоптера с использованием микросхемы DRV11873, которая представляет собой автономную слаботочную схему двигателя BLDC, состоящую из всех необходимых функций защиты, таких как защита от перегрузки, тепловая защита и т. д. Этот модуль в основном формирует ESC для нашего настоящего квадрокоптера.
д. Этот модуль в основном формирует ESC для нашего настоящего квадрокоптера.
Для получения дополнительной информации об этом дизайне и деталях печатной платы вы можете обратиться к исходному документу ниже:
http://www.ti.com/lit/ds/symlink/drv11873.pdf
Как это работает
Выводы FS и FG IC предназначены для улучшения IC с помощью дополнительных элементов управления через внешние цепи, поскольку мы не используем эти функции в нашей конструкции, эти выводы можно оставить неиспользованными и подключить к положительной линии через резистор 100K.
Вывод RD микросхемы определяет направление вращения двигателя. Подключение этого контакта к Vcc через резистор 100K позволяет вращать двигатель против часовой стрелки, в то время как оставление его неподключенным делает обратное и позволяет двигателю вращаться по часовой стрелке.
Контакт № 16 — это вход ШИМ, который используется для ввода входного сигнала ШИМ от внешнего источника, изменение рабочего цикла ШИМ соответственно изменяет скорость двигателя.
Выводы FR, CS также не имеют отношения к нашей потребности и поэтому могут быть оставлены неиспользованными, как показано на схеме, и подключены к положительной линии через резистор 100K.
Распиновка U, V, W — это выходы двигателя, которые необходимо подключить к соответствующему трехфазному двигателю BLDC квадрокоптера.
Распиновка COM предназначена для подключения общего провода 3-фазного двигателя, если ваш двигатель не имеет общего провода, вы можете просто сымитировать его, подключив 3 резистора 2k2 к контактам U, W, W, а затем соединив их. общий заканчивается контактом COM микросхемы.
На схеме также показана микросхема IC 555, сконфигурированная в режиме нестабильной схемы ШИМ. Это становится частью схемного модуля, и можно увидеть, что выход ШИМ с его контакта № 7 соединен с входом ШИМ схемы DRV IC, чтобы инициировать 4 двигателя с постоянной базовой скоростью и обеспечить постоянное зависание двигателя. скорость в заданном месте.
На этом завершается основная схема ELC или схема драйвера BLDC для нашей конструкции квадрокоптера.
Нам понадобится четыре таких модуля для четырехмотора в нашей конструкции квадрокоптера.
Это означает, что 4 таких DRV IC вместе с каскадом ШИМ IC 555 должны быть связаны с каждым из 4 двигателей квадрокоптера.
Эти модули гарантируют, что в обычном режиме все 4 двигателя будут установлены на заданную скорость путем подачи фиксированного и идентичного ШИМ-сигнала на каждую из соответствующих ИС контроллера DRV.
Теперь давайте узнаем, как можно изменить ШИМ с помощью пульта дистанционного управления, чтобы изменить скорость отдельного двигателя с помощью обычного 4-канального пульта дистанционного управления.
Модуль РЧ-приемника (ШИМ-декодер)
На приведенной выше схеме показана удаленная РЧ-схема приемника, которая должна быть размещена внутри квадрокоптера для приема внешних беспроводных ШИМ-данных с удаленного передатчика пользователя и последующей обработки сигналов. соответствующим образом для питания сопутствующих модулей контроллера DRV, как описано в предыдущем разделе.
4 выхода, обозначенные как PWM#1….PWM#4, необходимо соединить с выводом PWM №15 микросхемы DRV, как показано на предыдущей схеме.
Эти выводы ШИМ от радиочастотного приемника активируются всякий раз, когда пользователь нажимает соответствующую кнопку на своем передатчике.
Как должен быть подключен РЧ-передатчик (ШИМ-энкодер)В предыдущем разделе мы обсудили Rx или схему удаленного приемника и то, как его 4 выхода необходимо соединить с модулями драйвера ESC двигателя квадрокоптера.
Здесь мы видим, как необходимо создать простой РЧ-передатчик и соединить его со схемами ШИМ для беспроводной передачи данных ШИМ на приемник квадрокоптера, чтобы скорость отдельного двигателя регулировалась простым нажатием кнопки, что в конечном итоге заставить квадрокоптер изменить направление или скорость в соответствии с предпочтениями пользователя.
Схема, показанная выше, демонстрирует детали подключения модуля передатчика. Идея выглядит довольно просто, основная схема передатчика образована микросхемой TSW434, которая передает кодированные ШИМ-сигналы в атмосферу, и HT12E, который становится ответственным за подачу кодированных сигналов на микросхему TSW.
ШИМ-сигналы генерируются 4 отдельными ступенями схемы IC 555, которые могут быть идентичны той, которая обсуждалась ранее в модуле контроллера DRV.
ШИМ-содержимое 4-х интегральных схем подключено к соответствующим выводам микросхемы энкодера HT12E с помощью 4-х дискретных кнопок, обозначенных как SW1—-SW4.
Каждая из этих кнопок соответствует и переключает идентичную распиновку модуля приемника, которую мы обсуждали ранее и обозначенную как PWM#1, PWM#2…..PWM#4.
Это означает, что нажатие SW1 может привести к активации выхода ШИМ № 1 приемника, и эта распиновка начнет подавать полученные декодированные сигналы ШИМ от передатчика на соответствующий модуль DRV, что, в свою очередь, приведет к соответствующему изменению скорости соответствующего двигателя.
Аналогично, нажатие SW2,3,4 может использоваться для изменения скорости других 3 моторов квадрокоптера по желанию пользователя.
IC 555 Цепь ШИМ 4 цепи ШИМ, показанные на приведенном выше радиочастотном передатчике, можно построить, обратившись к следующей схеме, которая точно аналогична той, которая была показана в нашей схеме ESC контроллера DRV.
Помните, что потенциометр 5K может быть выполнен в виде обычного потенциометра и может использоваться дополнительно с кнопками выбора различных скоростей на соответствующих двигателях.
Это означает, что, удерживая нажатой выбранную кнопку и одновременно перемещая соответствующий потенциометр 5KPWM, можно заставить квадрокоптер увеличивать или уменьшать скорость в заданном направлении.
В качестве альтернативы ШИМ можно сначала установить на более высокий или более низкий уровень, а затем нажать соответствующую кнопку, чтобы позволить соответствующему двигателю квадрокоптера достичь предпочтительной скорости в соответствии с настройкой ШИМ.
Спецификация двигателя квадрокоптера Приведенная выше схема дистанционного управления квадрокоптером предназначена только для отображения и не может использоваться для подъема грузов или камеры. Это означает, что двигатели, используемые в конструкции, должны быть предпочтительно слаботочными.
Микросхема DRV11873 предназначена для работы с двигателями с номинальным напряжением 15 В, 1,5 А или мощностью около 20 Вт… поэтому для этой цели можно использовать любой трехфазный двигатель постоянного тока мощностью от 15 до 30 Вт.
Аккумулятором для этого квадрокоптера может быть любой литий-ионный аккумулятор 12 В, способный обеспечивать пиковое напряжение 15 В при постоянном токе 1,5 ампера.
Детали спецификации1306N Миниатюрный бесщеточный двигатель постоянного тока Outrunner
Тип: Микродвигатель
Конструкция: Постоянный магнит
Коммутация: Бесщеточный (А): 1,5 ~2,6 А
Напряжение (В): 7,4~11,1 В
миниатюрный двигатель постоянного тока: AX-1306N
Вес: 8 г
Диаметр вала: 1,5 мм
Аккумулятор LI-PO: 2-3 с
Рабочий ток: 1,5~2,6 А
Максимальная эффективность: 67%
9000 Важная терминологияКонтроллеры дронов повсюду в мире дронов, но задумывались ли вы когда-нибудь о том, как они на самом деле работают?
Источник изображения
В этой статье мы начнем с основ управления дроном, рассмотрим, как работают пульты дистанционного управления и какие функции они предоставляют пилотам. Мы также рассмотрим, что делает контроллеры дронов уникальными в мире радиоуправляемых самолетов, и дадим вам несколько быстрых советов по устранению проблем с подключением между вашим дроном и его контроллером.
Мы также рассмотрим, что делает контроллеры дронов уникальными в мире радиоуправляемых самолетов, и дадим вам несколько быстрых советов по устранению проблем с подключением между вашим дроном и его контроллером.
Но прежде чем мы углубимся, важно определить наши термины.
В рамках данной статьи под фразой контроллер дрона мы имеем в виду пульт дистанционного управления, который пилот дрона держит в руках и который заставляет дрон делать то, что хочет пилот. Контроллер полета , с другой стороны, представляет собой печатную плату, которая преобразует информацию от пульта дистанционного управления дроном в действие.
Контроллер дрона может также называться радиопередатчиком дрона, радиоконтроллером дрона или просто пультом дистанционного управления дрона.
Содержание
- Как работают контроллеры дронов?
- Должен ли я покупать контроллер для дронов?
- Дрон не подключается к контроллеру — устранение проблем с подключением
- Что делает контроллеры дронов уникальными в мире радиоуправляемых самолетов
- Важные термины — взгляд на то, как информация передается от контроллера к дрону
Как работают контроллеры дронов?
Контроллер дрона работает, отправляя радиосигнал с пульта дистанционного управления на дрон, который сообщает дрону, что делать.
Радиосигналы отправляются с радиопередатчика в контроллере дрона и принимаются приемником дрона. Вот почему контроллер дрона иногда называют просто радиопередатчиком дрона или радиоконтроллером дрона.
Экран FPV на контроллере вашего дрона
Многие контроллеры для лучших дронов на рынке не имеют экранов, прикрепленных к контроллеру, который поставляется вместе с дроном.
Если вы покупаете пульт дистанционного управления дроном без экрана, вы, как правило, можете использовать свой смартфон или планшет в качестве экрана для управления FPV (вид от первого лица).
Терминология пульта дистанционного управления дроном
Существует четыре основных способа управления дроном с помощью контроллера:
- Roll . Перемещает ваш дрон влево или вправо в воздухе, буквально «перекатывая» его.
- Шаг . Наклоняет дрон вперед или назад.
- Рыскание . Вращает ваш дрон по часовой стрелке или против часовой стрелки, позволяя вам рисовать круги или узоры в воздухе.
- Дроссель . Контролирует количество энергии, посылаемой вашему дрону, что заставляет его двигаться быстрее или медленнее.
Основные функции контроллера дрона
Во время полета, чем сильнее вы нажимаете на стик в определенном направлении, тем больше энергии передается дрону в этом направлении.
Если вы только учитесь летать, плавно нажимайте на стики, пока не освоитесь. Кроме того, имейте в виду, что каждый контроллер отличается. Даже если у вас есть некоторый опыт полетов, вы захотите ощутить новый контроллер дрона, прежде чем идти на полную катушку.
Правый джойстик
Правый джойстик позволяет управлять креном и тангажем дрона, позволяя вам перемещать его вправо/влево, а также вперед и назад.
Левый джойстик
Левый джойстик позволяет вам управлять рысканьем и дроссельной заслонкой вашего дрона, позволяя вам контролировать высоту, на которой вы летите, и позволяя вам вращать дрон по часовой стрелке или против часовой стрелки в полете.
Кнопки триммирования
Каждый пульт дистанционного управления дроном имеет собственную кнопку триммера:
Если вы заметили, что ваш дрон наклоняется в одном направлении, когда вы впервые начинаете летать, это, вероятно, означает, что его нужно подрезать. Вы можете использовать соответствующую кнопку триммера, чтобы скорректировать баланс по мере необходимости.
Стоит ли покупать контроллер для дрона?
Поскольку все дроны поставляются с собственными пультами дистанционного управления, не так уж часто можно найти на рынке отдельный пульт дистанционного управления для вашего дрона (если, конечно, ваш контроллер не сломался, или если вы собираете дрон своими руками). ).
Это означает, что, как правило, получение отличного контроллера для вашего дрона начинается с приобретения отличного дрона.
Лучшие дроны также имеют хорошие контроллеры — ознакомьтесь с этими бесплатными руководствами, чтобы увидеть список лучших RC дронов на рынке:
- Лучшие дроны с камерой
- Лучшие радиоуправляемые дроны
- Лучшие профессиональные дроны
Интеллектуальный контроллер DJI
Несмотря на то, что вы обычно получаете хороший контроллер, купив хороший дрон, DJI продает отдельный пульт дистанционного управления дроном, который называется Smart Controller.
Фото: DJI
Интеллектуальный контроллер совместим со всеми моделями DJI Mavic 2, включая Mavic 2 Zoom, Mavic 2 Pro и Mavic 2 Enterprise Series.
[ Примечание : на веб-сайте DJI говорится, что Smart Controller можно использовать с любым «летательным аппаратом, оснащенным OcuSync 2.0», но, насколько нам известно, только дроны Mavic 2 имеют OcuSync 2.0.]
На основании нашего исследования , DJI Smart Controller, возможно, стоит приобрести, если у вас есть Mavic 2, который вы используете для коммерческой работы и хотите обновить его.
Вот основные моменты:
- Встроенный дисплей с хорошей яркостью экрана, что означает, что вам не нужно использовать телефон, чтобы летать FPV
- Функции мобильного приложения DJI встроены в
- Позволяет размещать изображения/видео прямо в Интернете с контроллера
- Короткое время настройки
- Поставляется с выходом HDMI для мониторов
Однако цена завышена — Smart Controller в настоящее время продается на сайте DJI за 749 долларов.
Дрон не подключается к контроллеру — устранение проблем с подключением
Дрон не подключается к контроллеру?
Попробуйте:
- Убедитесь, что батареи контроллера дрона полностью заряжены (иногда низкий заряд батарей может привести к проблемам с подключением)
- Замена батарей контроллера новыми
- Убедитесь, что вы правильно выполнили инструкции по настройке, прилагаемые к дрону
- Вручную привязать пульт дистанционного управления дроном к дрону
Если описанные выше действия не помогли подключить дрон к пульту дистанционного управления, мы рекомендуем вам попробовать опубликовать сообщение о проблеме на форуме сообщества, посвященном дронам, или в частной группе Facebook, чтобы узнать, не сталкивался ли кто-то еще с такой же проблемой.
Отправляя сообщения, старайтесь быть как можно более конкретными. Укажите модель вашего дрона и шаги, которые вы уже предприняли для устранения неполадок.
Вот несколько ссылок для начала:
- Форум сообщества UAV Coach (форум)
- Официальный форум DJI (форум)
- Коммерческие удаленные пилоты SUAS (группа в Facebook)
Что делает контроллеры дронов уникальными в мире радиоуправляемых самолетов
Радиоуправляемый (RC) летательный аппарат — это любой небольшой летательный аппарат, управляемый дистанционно.
Все дроны — это радиоуправляемые летательные аппараты, но не все радиоуправляемые летательные аппараты — это дроны.
Фактически, радиоуправляемые летательные аппараты предшествовали современным дронам более чем на сто лет. Первыми радиоуправляемыми самолетами были водородные модели дирижаблей, которые были созданы и летали в конце 19 века.века как акт мюзик-холла. Эти дирижабли управлялись с помощью искрового радиосигнала.
Хотя RC традиционно относится к радиоуправляемому, его часто используют для обозначения дистанционного управления.
Хорошая новость заключается в том, что, поскольку радио — это средство дистанционного управления самолетом, замена пульта на радио на самом деле не меняет значения RC. В любом случае, мы имеем в виду летательный аппарат, которым управляет пилот, стоящий на земле с помощью контроллера дрона или какого-либо радиопередатчика, который соединяется с летательным аппаратом посредством радиосигналов.
Источник изображения
Многороторный и одномоторный
Одно большое различие между дронами, какими мы их себе представляем сегодня, и всеми другими радиоуправляемыми летательными аппаратами заключается в том, как они приводятся в действие, т. роторные и одномоторные суда.
роторные и одномоторные суда.
[ Примечание : Ротор — это втулка, которая прикрепляет пропеллеры дрона к дрону. Каждый ротор дрона имеет свой двигатель, поэтому мультироторный дрон также является мультимоторным дроном.]
Все современные дроны — это мультироторные летательные аппараты.
Это означает, что у них несколько роторов — обычно не менее четырех, а иногда до восьми или даже двенадцати. Когда вы слышите о квадрокоптере или гексакоптере, все они указывают на то, сколько роторов у дрона (у квадрокоптера четыре ротора, у гексакоптера шесть и так далее).
С другой стороны, все другие дистанционно управляемые суда, будь то автомобиль, лодка или самолет, управляются одним двигателем.
И разница между мультироторным и одномоторным напрямую влияет на то, как контроллеры дронов связываются с дроном, которым они управляют, а также на то, как пилот контролирует свой летательный аппарат.
Пилот, управляющий самолетом с одним двигателем, имеет точный контроль над этим единственным двигателем. Он или она может использовать дроссельную заслонку на своем контроллере, чтобы немного увеличить мощность или немного уменьшить мощность, и эти изменения мощности напрямую влияют на выходную мощность и результирующую скорость корабля.
Он или она может использовать дроссельную заслонку на своем контроллере, чтобы немного увеличить мощность или немного уменьшить мощность, и эти изменения мощности напрямую влияют на выходную мощность и результирующую скорость корабля.
Сравните дроссель на одном моторном корабле с эквивалентом на контроллере дрона.
Поскольку было бы невозможно управлять несколькими роторами одновременно, то есть иметь дроссель для каждого двигателя, который пилот должен постоянно балансировать с другими, контроллеры полета позволяют дрону оставаться сбалансированным в воздухе, и определить, какие роторы получают мощность в разное время, чтобы поддерживать устойчивый полет.
Важные термины. Взгляд на то, как информация передается от контроллера к дрону
Как вы, возможно, уже заметили, бывает сложно говорить о контроллерах дронов, не вдаваясь в конкретные компоненты дрона.
Чтобы прояснить наши термины и то, как все работает в гармонии, чтобы удерживать дрон в полете, не говоря уже о том, чтобы позволить пилоту дрона управлять дроном, давайте посмотрим на различные основные части дрона.
Источник изображения
Контроллер дрона/Радиопередатчик дрона
Контроллер дрона позволяет пилоту управлять дроном с помощью радиосигналов.
Приемник дрона
Приемник дрона — это электронное устройство, использующее встроенные антенны для приема радиосигналов от контроллера дрона.
Но приемник не просто принимает сигналы от контроллера дрона. Он также интерпретирует сигналы и преобразует их в импульсы переменного тока.
Затем эта информация отправляется на панель управления полетом или контроллер полета, который приводит информацию в действие, управляя дроном, как указано исходными радиосигналами.
Контроллер полета
Контроллер полета — это печатная плата, которая управляет полетом дрона.
Проще говоря, задача полетного контроллера состоит в том, чтобы контролировать мощность, или число оборотов в минуту, для каждого отдельного двигателя дрона в ответ на информацию, полученную от контроллера.
Когда пилот дрона сдвигает джойстик вправо на контроллере дрона, контроллер полета дрона фактически заставляет дрон двигаться вправо.
Можно сказать, что контроллер полета — это нервная система дрона. Он получает необработанную информацию от контроллера дрона, передается через приемник, а затем выполняет соответствующее движение роторов дрона
, что приводит к желаемому результату.
Но работа полетного контроллера намного сложнее, чем просто подавать питание на двигатели дрона. Помните, что мы говорили выше о разнице между многороторными и одномоторными катерами?
Поскольку у дронов несколько роторов, задача контроллера полета состоит в том, чтобы принимать информацию, отправленную контроллером дрона, и затем действовать в соответствии с ней, чтобы каждый отдельный ротор получал необходимое количество энергии для выполнения запрошенного движения.
При правильной настройке полетного контроллера команды пилота дрона, отправляемые через него, должны точно соответствовать тому, как дрон движется в воздухе. Некоторые полетные контроллеры могут быть настроены и запрограммированы пилотом, но для этого требуется достаточно глубокий уровень знаний.
Электронный регулятор скорости
Электронные регуляторы скорости (ESC) преобразуют сигнал в электропитание, контролируя скорость вращения двигателя путем регулировки электрического тока (ампер), чтобы обеспечить плавную и эффективную работу двигателей.
У дрона каждый мотор имеет собственный ESC, который подключается напрямую к полетному контроллеру. После того, как полетный контроллер вычисляет точные входные данные, необходимые для выполнения определенного маневра, он направляет необходимое количество энергии через ESC на двигатели дрона.
Учитывая сложность полета с несколькими роторами, регуляторы скорости дрона имеют высокую частоту обновления, чтобы гарантировать сохранение баланса во время полета.
Фух.
Как видите, многое должно произойти, чтобы контроллер дрона мог сказать дрону, что делать.
Простое вращение дрона вправо требует, чтобы радиосигнал был отправлен от контроллера дрона, принят приемником, приведен в действие контроллером полета, а затем отправлен через ESC на двигатели дрона, где поворот может затем быть казненным.